协作机器人到人形人机器人:将系统效率和安全性融入更大功率的机器人中
来源:Texas Instruments(德州仪器)
发布时间:2025-10-15
随着制造业的自动化程度不断提高,以及消费者在家中安装这些自动化系统,机器人市场将继续增长。公司纷纷开始在其工厂和仓库中实现制造系统的自动化,并适应未来机器人与人类进行更多互动的情形。
据制造机器人的设计工程师了解,有数百种不同类型的机器人系统。如图 1 所示,机器人种类繁多,从功率只有几瓦的小型辅助机器人到自主移动机器人、人形人机器人以及功率高达 4kW 及更高的重型工业机器人。
图 1:协作机器人、移动机器人、人形人机器人和
工业机器人有各种形状和尺寸,
功率级别范围为 10W 至 ≥4kW
机器人制造商在开发高级系统时面临几项设计挑战。上述机器人应用通常使用 48V 电压轨并支持 2kg 至 40kg 的有效载荷。在设计更高负载时,工程师必须同时考虑机械和设计影响,以适应更高的功率级别。较高的电流可能会因电磁干扰 (EMI) 或开关损耗过高而导致系统性能低下。功能安全也是一个重要因素,因为机器人经常在有人类存在的环境中使用。无论是在生产车间还是在消费者的家中,设计能够在必要时安全关闭的系统都非常重要。
借助 TI DRV8162 等智能单半桥栅极驱动器设计人员可以灵活地创建能够承受大功率和电压范围,同时降低 EMI 并符合功能安全标准的集成系统。
TI 的智能栅极驱动器采用 IDRIVE 可调栅极驱动电流方案,可在多个级别的栅极电流中控制 MOSFET 压摆率。 DRV8162 具有 16 种可调的粒度设置(如图 2 所示),可控制何时选择 MOSFET 和终端应用。
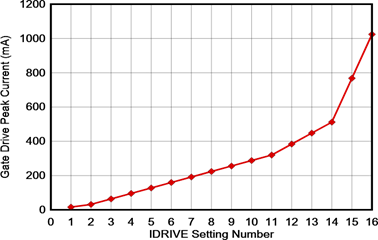
图 2:DRV8162 的 16 个 IDRIVE 设置和可编程的
拉电流/灌电流比可省去外部无源器件并简化设计
使用方程式 1,可根据 MOSFET 的栅漏电荷 (Qgd) 规格以及 MOSFET 漏极和源极之间最大电压的上升和下降时间,估算出更适合系统的 IDRIVE 设置。这些值会随系统性能要求而变化。
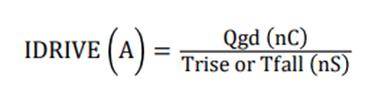
方程式 1
如果 IDRIVE 与器件中的栅极驱动设置不匹配,则需要额外的无源器件(包括栅极电阻器)来实现所需的栅极电流。这些额外元件会增加物料清单成本并扩大印刷电路板 (PCB) 尺寸,进而可能会对协作机器人、移动机器人和人形机器人等关节中的小型设计造成影响。
使用同类半桥栅极驱动器时,需要使用外部栅极电阻器,因为它们仅提供固定电流或两到四个分立式设置。DRV8162 驱动器提供 16 种栅极驱动设置和可编程拉/灌比率,可灵活移除外部无源器件并简化设计。
宽 Qgd 支持使驱动器能够应用于不同 MOSFET 的各类低功率、中功率和高功率机器人平台,而无需更改每个系统中的栅极驱动器设计。DRV8162 的栅极拉电流和灌电流可分别设置为低至 16mA 和 32mA,最高可达 1024mA 和 2048mA。例如,48V 系统中的 1V/ns 压摆率可用于计算 48ns Trise/Tfall。这会产生该器件可以支持的 0.77nc/1.54nC 至 49.15nC/98.30nC MOSFET Qgd 范围。
与三相集成式栅极驱动器相比,DRV8162 的单半桥架构使其能够更靠近 FET。图 3 展示了两种圆形 PCB 设计,其中比较了三相与单相半桥实现。
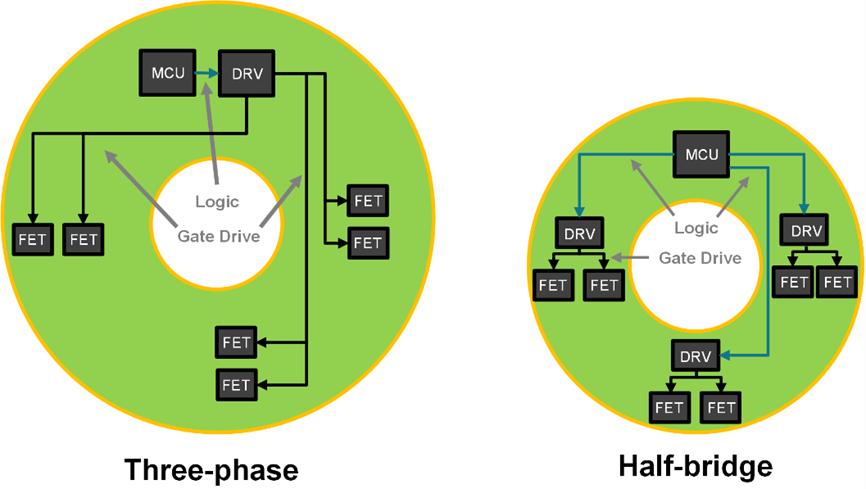
图 3:采用三相栅极驱动器实现方案的圆形 PCB 设计,
左侧是 MCU、驱动器和 FET,右侧是单个半桥设计
将栅极驱动器放置在更靠近 FET 的位置可缩短布线长度,提高信号完整性,并减少栅极和源极节点上的寄生效应。更短的路径还有助于降低布线电感的影响,从而降低振铃和 EMI。
此外,DRV8162 有助于通过 20ns 的死区时间改善系统效率和声学性能,还有助于扩大工作脉宽调制占空比范围,从而扩大速度范围,同时提高电机的可用电压。更短的死区时间还可以更大限度减少二极管导通损耗,提高系统效率,并减少电机电流失真,从而降低可闻噪声。这些效果可提高系统的整体性能和效率。
许多机器人与人类并肩作战,因此在发生电源故障、电涌或短路时关闭系统至关重要。在器件扭矩无法预测的情况下,电机驱动应用出现故障可能会导致危险情况。由于一些机械在涉及重负载的工业环境中运行,因此必须能够安全关闭并防止意外启动。
国际电工委员会 (IEC) 61800-5-2 标准定义了电路设计中被称为安全扭矩关断 (STO) 的安全功能,该功能可防止向电机供电。DRV8162 和 TI 的 DRV8162L 采用了分离电源架构,可支持系统中实施 STO。
在更高功率的设计中,工程师可以参考适用于集成电机驱动器的 48V、4kW 小型三相逆变器参考设计 (前往 TI.com 搜索 ”TIDA-010956” 了解更多信息),该设计采用了具有 48VDC 输入电压和 85ARMS 输出电流的 DRV8162L。如图 4 所示,该设计包含建议的 STO 概念、并联 FET、高功率和单个半桥栅极驱动器。
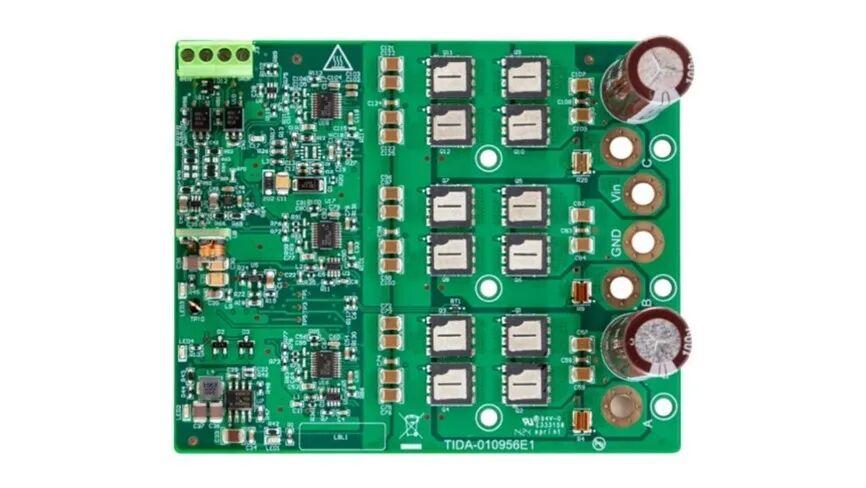
图 4:TI 的三相逆变器参考设计 (TIDA-010956)
机器人的现有电机设计采用分立式实现来满足安全要求,这会增加电路板尺寸和物料清单数量。为了提高各种形状和尺寸的机器人的效率和安全性,需要使用 DRV8162 这类更小、更安全的集成式栅极驱动器。
新款智能单半桥栅极驱动器助力设计人员将功率从 10W 扩展到4kW 及更高,同时缩小 PCB 尺寸,提高性能和安全性,并提供灵活性,从而在未来多年内加速机器人创新。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




