全网首拆!深度拆小米YU7四合一域控模块——深度分析英伟达Thor智驾域控
来源:硬件助手
发布时间:2025-07-30
本文主要拆解分析小米YU7四合一控制器中的智驾模块。从整体系统方案到硬件实现,再到主要器件等。
前言
2025年6月26号晚,小米在北京发布首款豪华高性能SUV“小米YU7”,全系标配800V快充和激光雷达,零百加速3.23s,CLTC续航835km,标准版25.35万元起,直接对标特斯拉Model Y。雷军称“YU7是为不甘平庸的人设计”,发布会3分钟大定突破20万台,1小时锁定28.9万台,刷新小米SU7纪录。
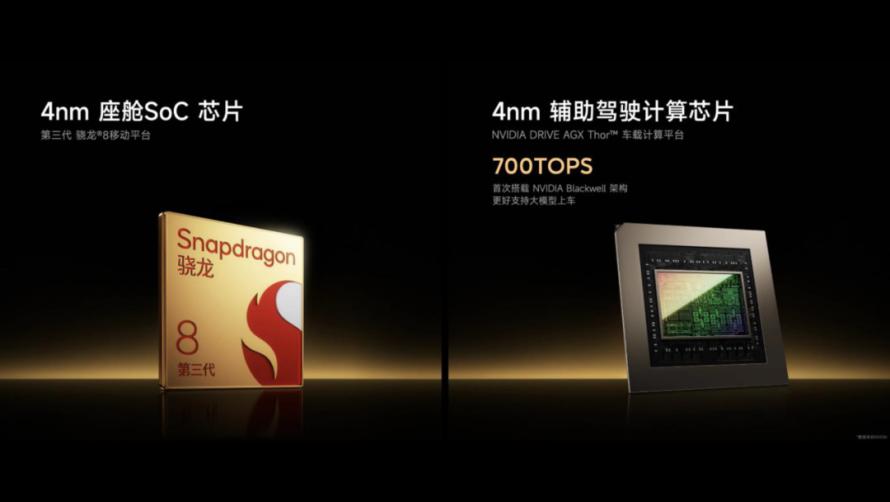
新车最大亮点是首搭“四合一域控模块”,把整车、座舱、辅助驾驶及T-Box四大域控制器合为一块3.6kg的主板,体积缩57%,零件少75%,15分钟可完成OTA,哨兵模式功耗降40%,整车因此多跑16km;配合高通4nm的骁龙8Gen3座舱芯片和Nvidia的4nmThor SOC(700TOPS算力,是继理想2025换新版之后第二家发布该平台的 )。
下面就针对该四合一域控制器进行详细的介绍。拆机过程可参考b站的详细视频,链接如下:
https://www.bilibili.com/video/BV1363czNEsz/
系统介绍
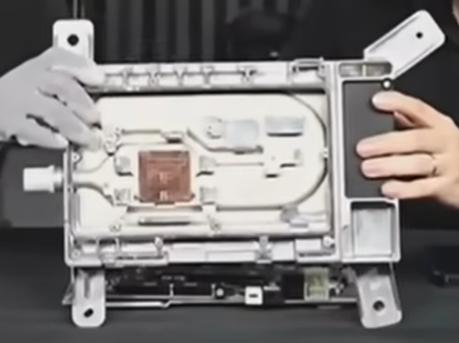
整个四合一域控模块包括两块板卡,一块是以高通骁龙8 Gen3为主的CDC板卡,一块是以NVIDIA Thor为主的ADAS板卡。两块板卡使用一套水冷结构壳体。
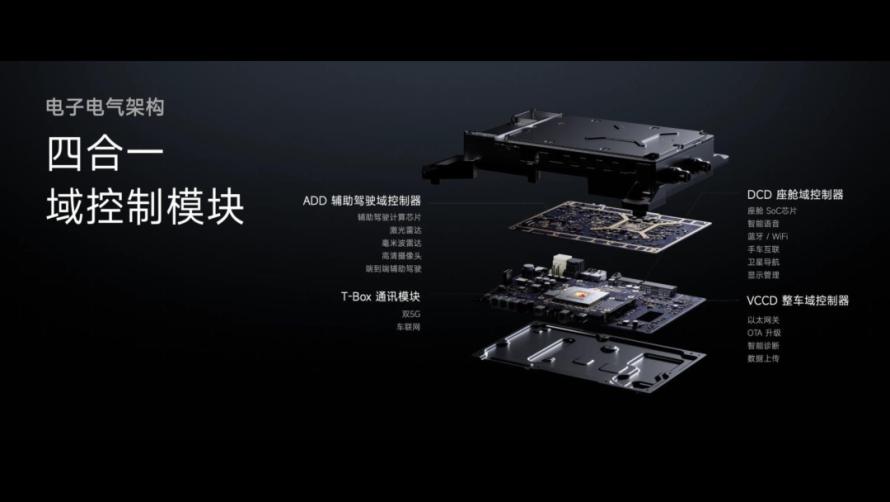




整个传感器系统包括:1L1R11V12U,1个激光雷达,1个4D毫米波雷达,4个环视,7个ADAS摄像头(2前1后4侧),12个超声波雷达。

智驾板卡硬件方案
下面针对智驾板卡进行详细分析,座舱板卡后续有机会再分析。
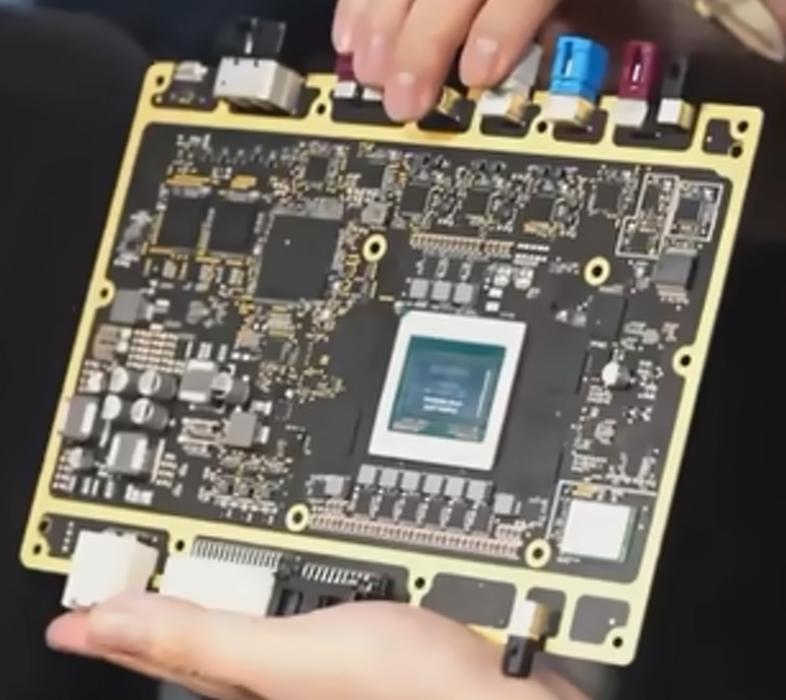

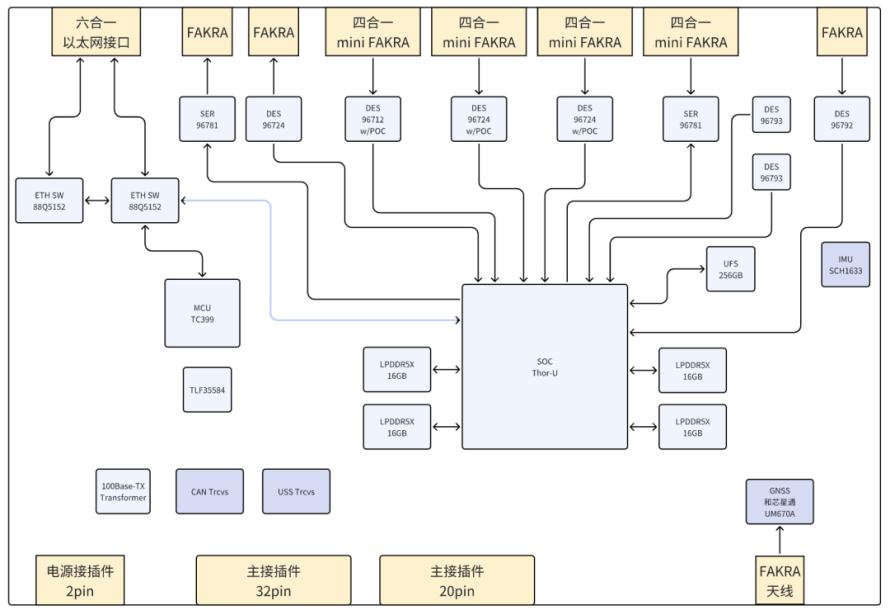
智驾板卡主要器件



免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




