智能机器人新方向: 软体自修复技术
来源:智能传感器网
发布时间:2025-08-26
自愈合组件和系统的概念并非新鲜事物,材料科学家和工程师们长期以来一直试图模仿生物体(包括人类)的这一能力。然而,几乎所有这些努力都并非在生物学意义上的真正自愈。相反,它们通常旨在识别故障,然后实施绕过或替代方案,例如重定向程序以访问未使用的内存块或切换备用功能块,而不是真正修复缺陷。
或许最令人惊叹的“重定向”案例来自喷气推进实验室(JPL)团队,该团队至今仍在监测1977年发射的“旅行者1号”和“旅行者2号”,这两艘探测器目前已飞出太阳系,距离地球约220亿公里(150亿英里)。2024年,旅行者1号无法向地球发送可读的科学和工程数据,尽管基本的通信链路仍然有效。
尽管存在22小时的单向传播延迟和仅100比特/秒的缓慢数据传输速率,团队仍成功诊断出问题源于某一内存银行的部分故障。随后,他们将机载代码重新定向,改用多个较小的未使用内存分区替代故障分区。
“自愈合”技术已经 Next Level 了
尽管在实验室层面已取得了一些真正的自愈合成功案例,甚至已有具备此属性的标准商用金属化电容器,但研究人员仍在努力开发更先进的自愈合技术以应对受损材料。如今,内布拉斯加大学林肯分校的研究团队开发了一种分层材料,可应用于软体机器人技术。该材料能够识别由穿刺或极端压力引起的损伤,精确定位损伤位置,并自主启动自修复过程(图1)。
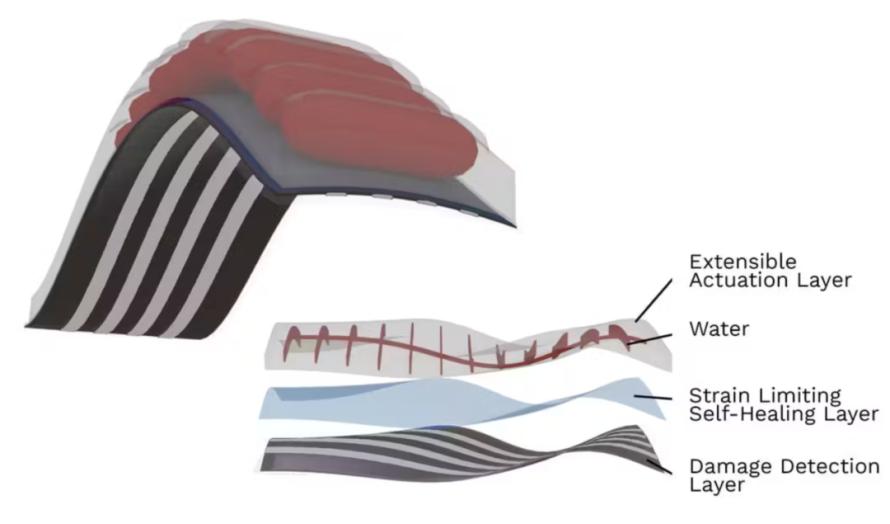
图1. (A)智能自愈人工肌肉示意图。(B)分层结构的分解示意图和先进材料的集成,使人造肌肉能够感知损伤并促进自我修复机制,而无需人工干预或外部愈合机制。
该团队的“肌肉”执行器有三层。底部的损坏检测层是由嵌入有机硅弹性体中的液态金属 (LM) 微滴组成的柔软电子皮肤。该皮肤粘附在中间层,即自愈成分,这是一种坚硬的热塑性弹性体。顶部是驱动层,当用水加压时启动肌肉的运动。
为了启动该过程,研究团队在肌肉底部“皮肤”层上施加五组监测电流,该层通过微控制器和传感电路与系统连接。若该层遭受穿刺或压力损伤,将触发导线间形成电气网络。系统将此电气特征识别为损伤证据,并随后增加流经新形成电气网络的电流。
因此,该网络可作为局部焦耳加热器,将电流的能量转化为损伤区域周围的热量。几分钟后,该热量熔化并重新加工中间的热塑性层,从而密封损伤并有效实现伤口自愈。
最后一步是通过清除底层的损坏电气足迹,将系统恢复到原始状态。为此,研究团队利用了电迁移效应,即电流导致金属原子迁移的过程。(需注意,这一现象通常被视为金属电路中的有害现象,因为移动的原子会变形并导致电路材料中出现间隙或短路,最终导致设备故障和损坏。)
构建柔性机器人执行器
研究人员设计了一种柔性机器人执行器,其结构包含一层硅弹性体(该层带有一系列气囊),并与一层更坚硬、不可伸缩的热塑性弹性体(TPE)层粘合。柔性电子皮肤的制备方式为:将液态金属(LM)微滴嵌入高可变形弹性体基体中。随后,这种液态金属(LM)弹性体复合材料被粘合到 TPE 层上。
当顶部有机硅层被水充气时,可伸展顶层与不可伸展底层之间的应变差异导致执行器弯曲。柔性电子皮肤包含四条平行导线,通过监测每条导线之间的阻抗来检测损伤位置(图2)。
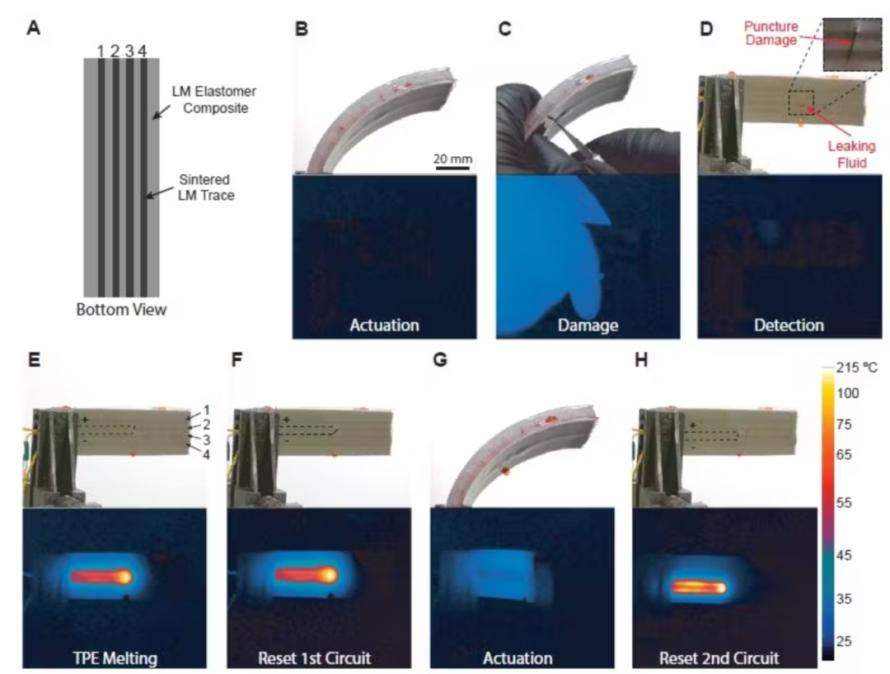
图2. 智能自愈人工肌肉:(A)执行器底视图和配置损伤检测层,四轨检测损伤事件。(B)用染色水对执行器加压,(C)用精密刀刺穿。D) 该损伤事件对损伤检测层(迹线 2、3 和 4 之间)和自愈 TPE 层造成损伤。显示流体从执行器泄漏。(E)执行器减压,在迹线2和3之间施加电流,以熔化自修复TPE层并密封穿刺。(F) 然后电流增加,导致电迁移和热故障以重新配置电网。(G) 执行器再次加压并按预期运行。(H) 通过在迹线 3 和 4 之间施加电流斜坡来完全重置损坏检测层,直到发生电迁移和热故障,从而重新配置电网。
如果检测到连续性,则新形成的电网相对于四个监控迹线具有较高的电阻,从而使网络能够作为局部焦耳加热器工作。焦耳加热元件可用于对穿孔区域进行几分钟的局部加热,以熔化TPE层并自我修复穿孔损伤。这使执行器能够继续像以前一样正常工作。
电迁移效应
研究人员意识到,他们可以利用电迁移效应来解决长期困扰他们创建自主自愈系统的一个问题:底层由损伤引起的电气网络似乎具有永久性。如果无法重置基线监测轨迹,系统无法完成多个损坏和修复周期。
这种电迁移——其能够物理分离金属离子并引发开路故障——可能是消除新形成痕迹的关键。该策略奏效了:通过进一步提升电流,研究团队成功诱导了电迁移和热失效机制,从而重置了损伤检测网络(图3)。
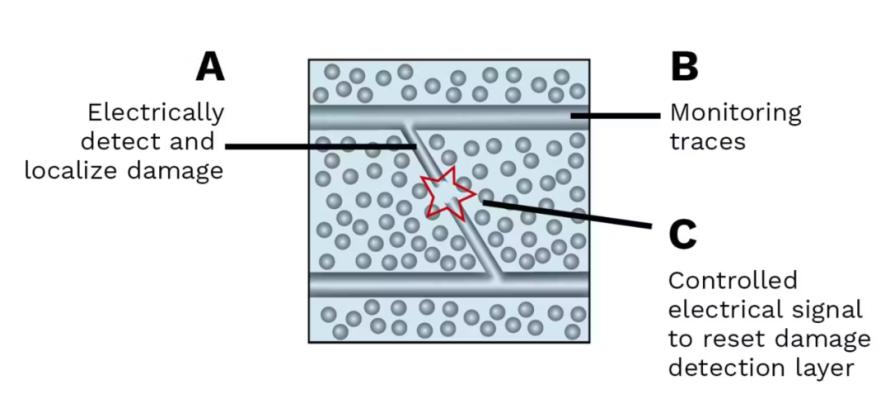
图3. 该简化示意图显示了如何使用电迁移原理来重置损坏检测功能。
埃里克·马克维卡(Eric Markvicka),生物医学工程副教授兼项目负责人指出:“……电迁移通常被视为一个巨大的负面因素。它是阻碍电子设备小型化的瓶颈之一。我们在这里以一种独特且积极的方式利用它。我们不再试图阻止它发生,而是首次利用它来擦除我们曾经认为是永久存在的痕迹。”
该研究得到了美国国家科学基金会、美国国家航空航天局内布拉斯加州竞争性研究促进计划以及内布拉斯加州烟草和解生物医学研究发展基金的支持。他们在论文“Intelligent Self-Healing Artificial Muscle: Mechanisms for Damage Detection and Autonomous Repair of Puncture Damage in Soft Robotics”中详细讨论了这项工作,该论文在 2025 年 IEEE 机器人与自动化国际会议上发表。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




