拆解海外版小米扫地机器人:用了意想不到的芯片
来源:机器人开发圈
发布时间:2025-07-09
一直很好奇家用扫地机器人用了什么芯片。最近偶然的机会得到了一台“海外版”的扫机器人,接下来让我们拆开看看内部结构,是怎么实现移动、扫地功能,同时看看用了哪些芯片。
本次素材照片比较多,大概有一百多张照片,前半部拆壳子、雷达、后半部分拆驱动、主板。
整体拆解和雷达

为啥说海外版呢,我按开机按键,闪烁灯,还有一个女声讲英文。
外观,都差不多,两个按键,开机与小房子,按小房子应该是回去充电。前方是碰撞部分。

正前方有传感器。可以识别前方物品。

上方有雷达,一般开机后,不会工作,先雷达全局扫描,整个户型,然后才开始工作。小米的logo在雷达的正上方。

后面两块金属是充电的接触点,自动回去充电,会接触充电器的金属。

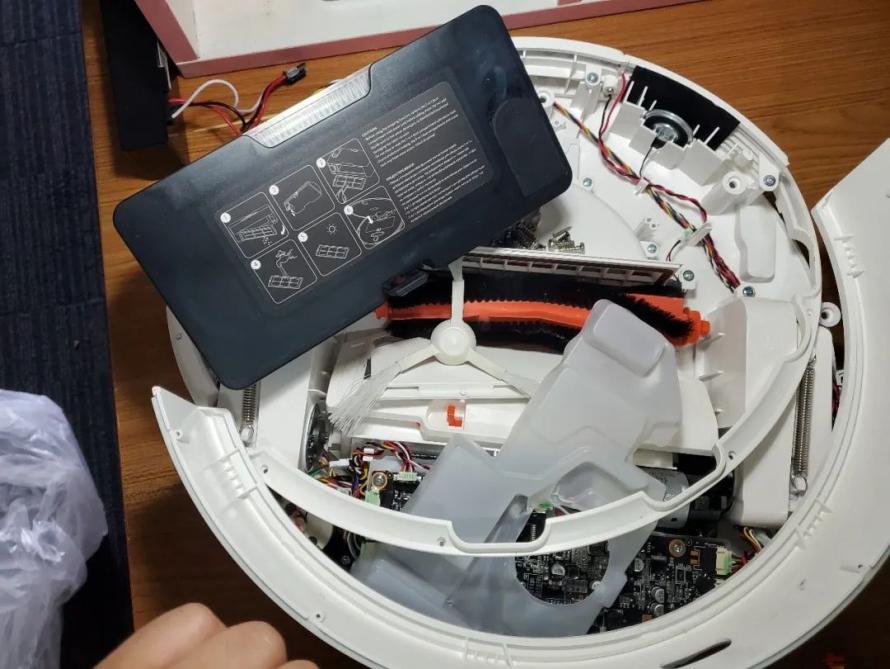
打开上方盖板,可以看到毛刷刀片收纳在这个地方,黑色的是集尘盒,灰尘都是在这个黑色盒子。开机按键有链接WIFI方法,两个按键同时按7秒,右边是恢复设置,下方是暂停。
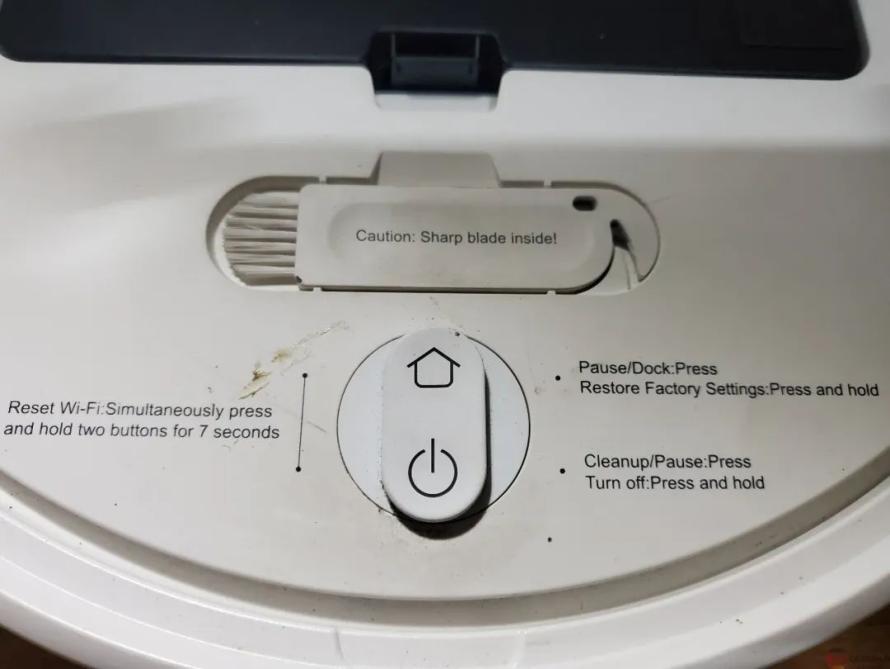
刀片用于割毛发,会缠绕在轮子上。
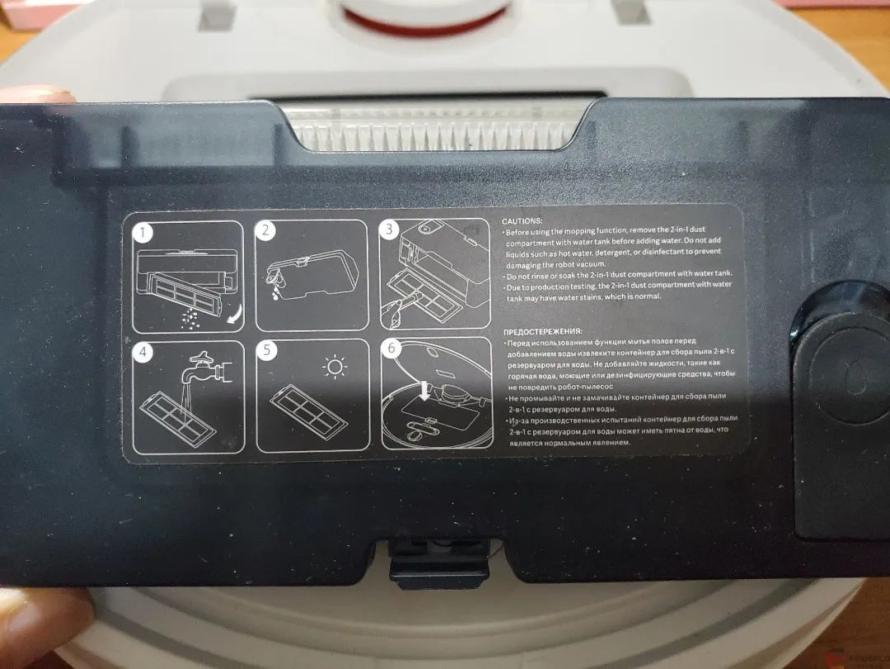
取下集尘盒,上面也全部是英文介绍使用方法。右边是加水,所以这个盒子能添加一点水,可以用来增加配件来实现吸尘,拖地。

滤网,左下角有两个触点,是水的开关吧。

打开滤网,灰尘还是很多的。可以吸好多肉眼看不到的灰尘,与毛发。集尘盒空间挺大,可以装好多灰尘。

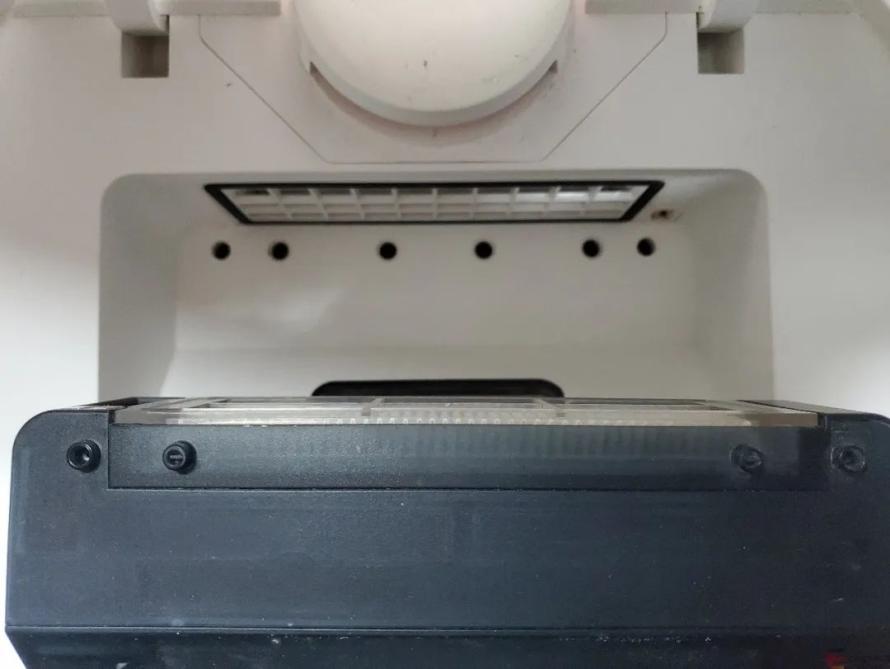
过滤网的另一边,是吸风的区域,还有底部的排水口。
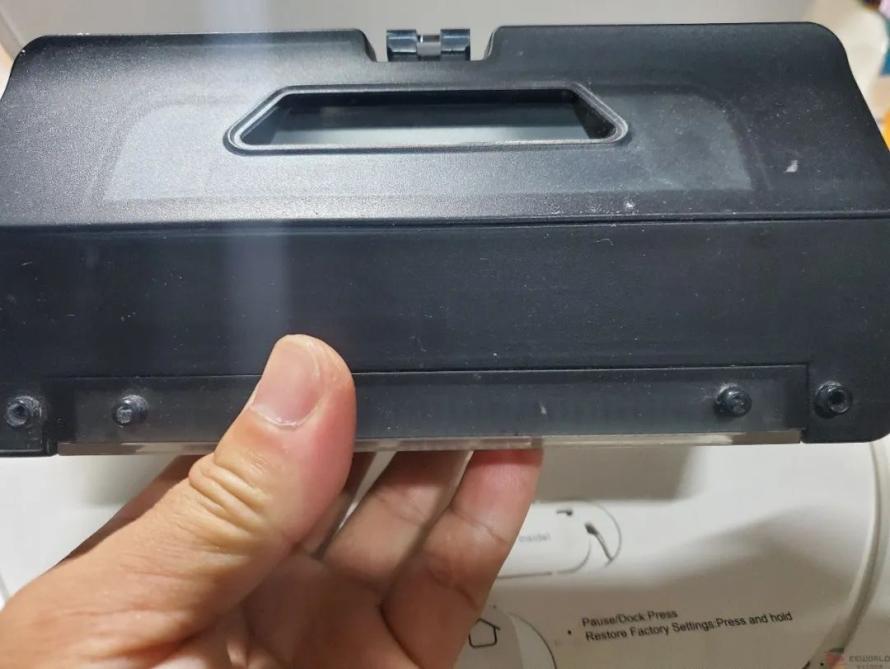
6个排水口,但是这个集尘盒只有4个排水口。这就尴尬了。
这样就可以对比出来,中间缺两个排水口。

底部也是6个口。

扫地机由3个轮子驱动,这个是方向轮,万向轮,当碰到障碍物会转动方向。轮子也是好多毛发。

S10只有一个毛刷,我记得原来我有一个斐讯的扫地机,是两个毛刷,分别往中间扫,然后被吸进集尘盒里,这个单刷,那么清扫的面积了可能会小一些。

底部后面的驱动轮,橡胶轮,比较容易驱动防滑。左边是传感器。

毛刷,忘记推红色拨杆,就可以取下来。

看到底部左右的凹槽,应该是有拖地的配件插进凹槽。

小米扫地机器人S10的标签,海外版,所以所有参数都是英文版。功率45W,电压14.8。

底部的中间防拆标签还在。

取下盖子,扫地部分,使用这种V型设计,用来拾取灰尘。

取下来,里面还有一根牙签,一边扫,一边吸,所以会清扫的很干净。

四颗螺丝应该是电池盖板的。

取下螺丝,电池拿出来。

电池的标签,230801生产日期吧。电池接口为3根线。

打开盖子,取出电池,是4颗18650串联组成14.8V。
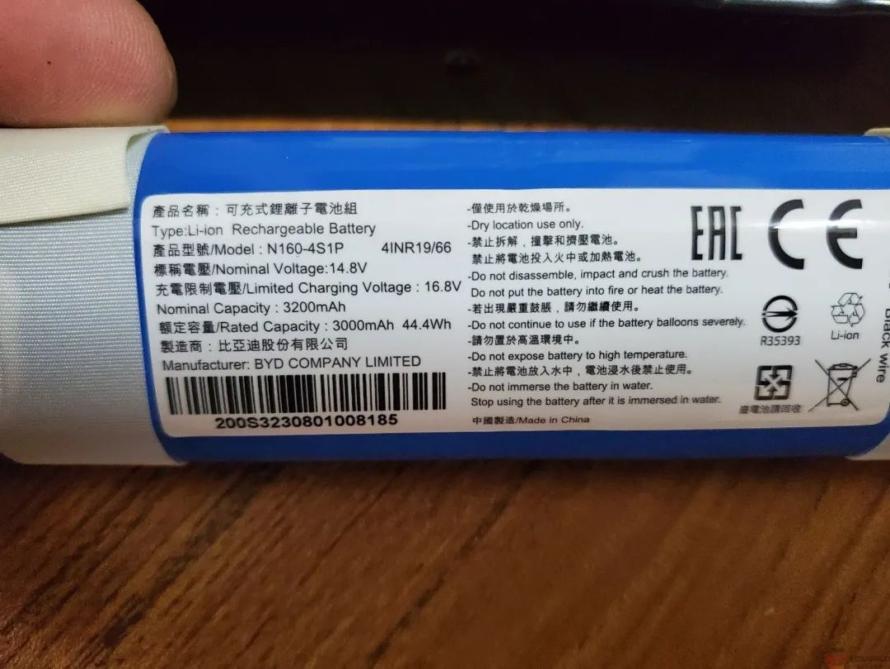
产品名称,可充锂离子电池组,繁体字,型号为N160-4S1P,电压,14.8,充电限制电压,16.8V,额定容量为3000mAh,44.4Wh,制造商为比亚迪股份有限公司。右边数据为注意事项。再右边是各种执行标准。

取下毛刷。

取下前面碰撞的6颗螺丝,可以取下前面盖板。

盖板由正前方的两个压片支撑。

左边的碰撞开关,碰到后,改变驱动轮的方向。

右边碰撞开关。

落水槽这边的螺丝也需要拆下来。才能打开上壳。
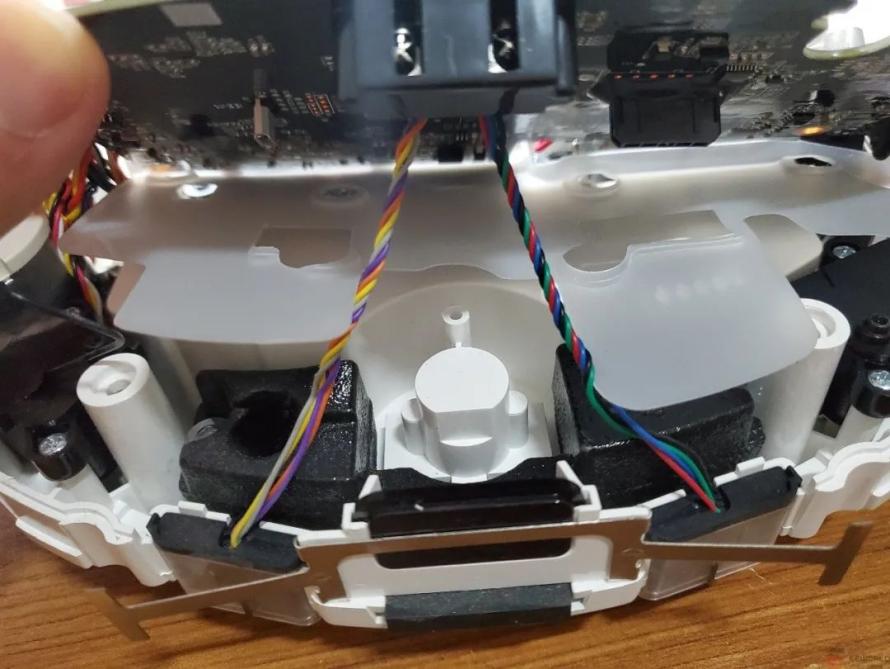
取下上壳,底部整个主机就可以看到。主板部分还做了防水壳。

接下来先看下上半部分的雷达。雷达整个由5跟线驱动,标签为230818,旁边一个马达。
取下排线,小板这边没有元件,只有接口,与测试点。

7个测试点。

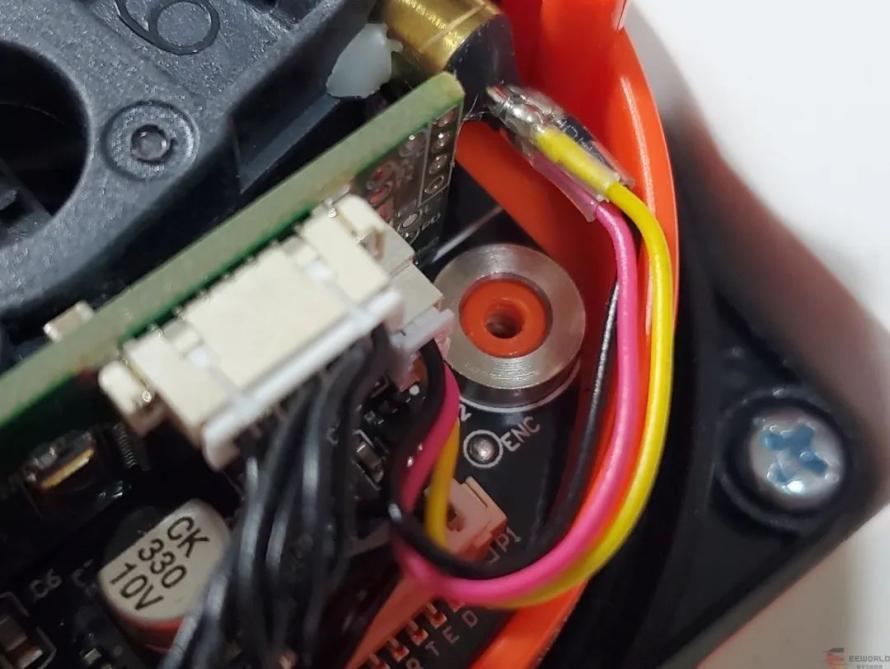
小板正面,有一个芯片。一些电容电阻,还有个电感。
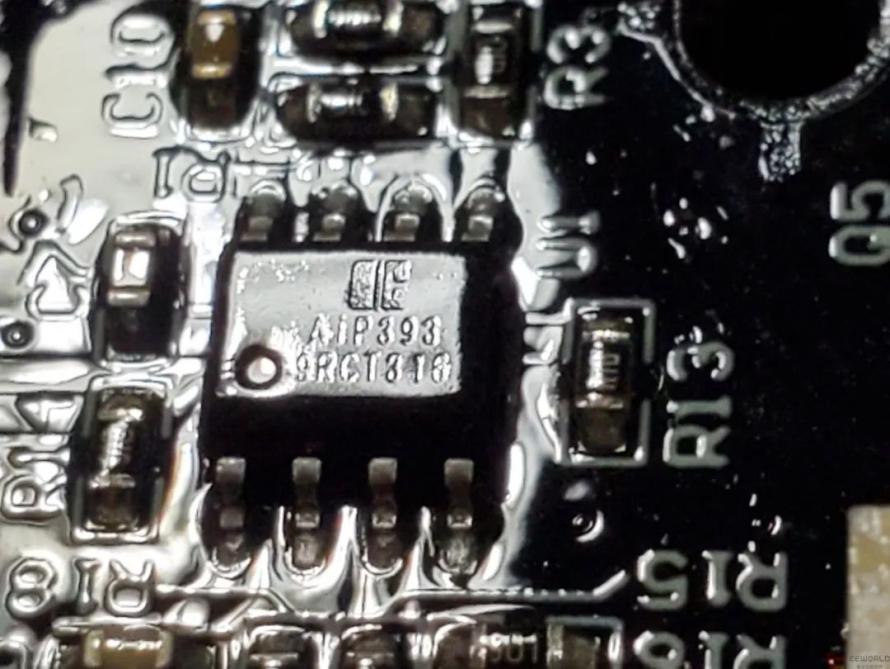
主板有做防水处理,芯片模糊看到是中微爱芯的AIP393是一个两路差分比较器。
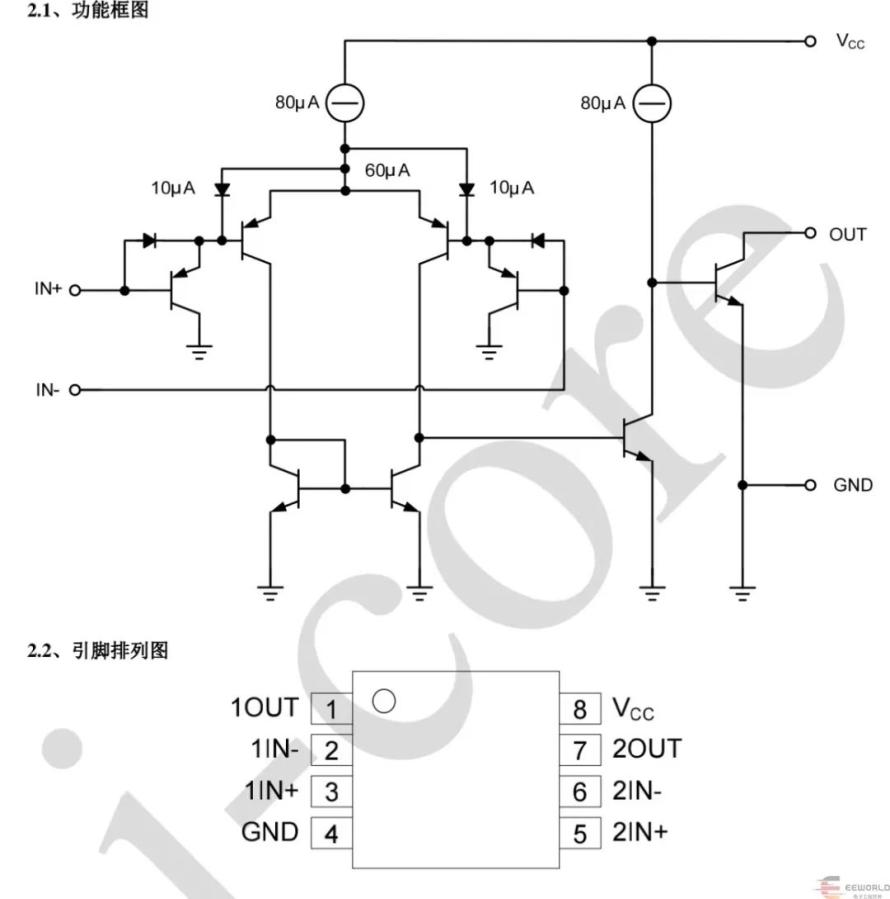
功能引脚图

引脚与其他参数图。

小板单独引出两根线,连接另一面。

雷达部分,凸起的这块,拆掉上壳,还是取不下来。

拆掉上盖板,去下上盖,才可以打开。

取下壳子,漏出一个红色装置。三个螺丝,取下。
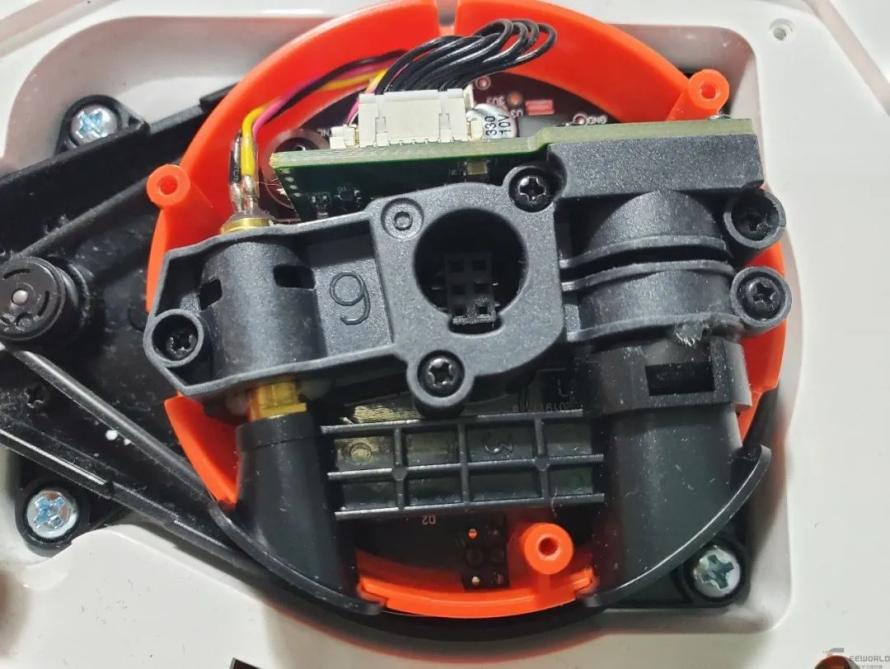
可以看到雷达部分了。黑色外壳。5个螺丝固定,

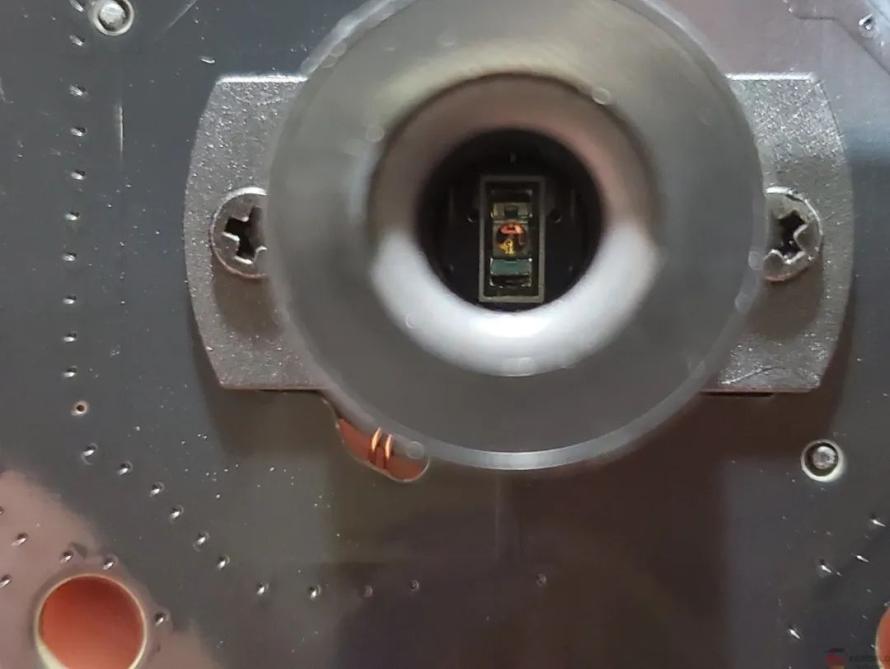
取下一个盖板,左边是红外线发射,右边有些像摄像头。
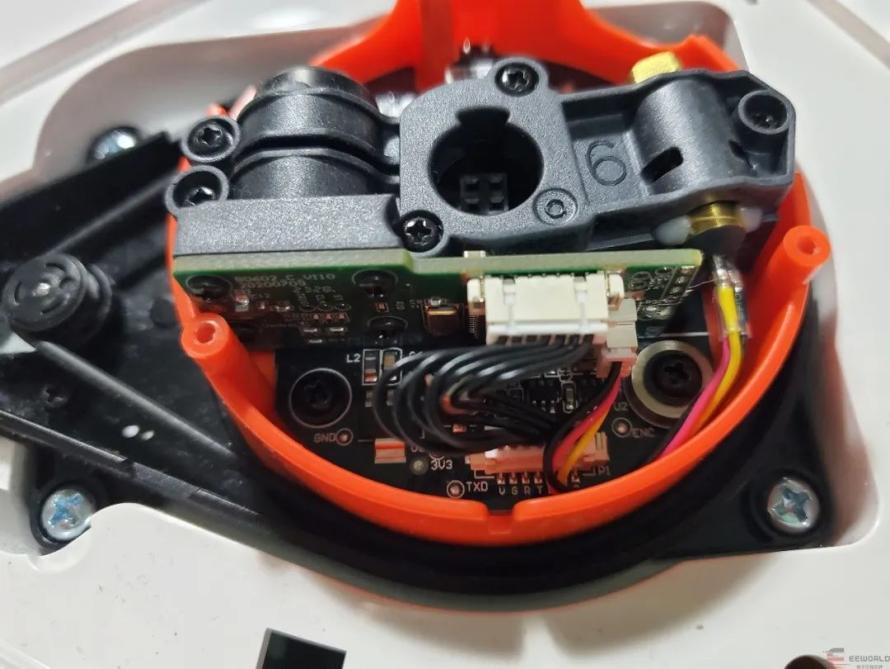
背面部分,一根排线连接。
螺丝拆掉后。

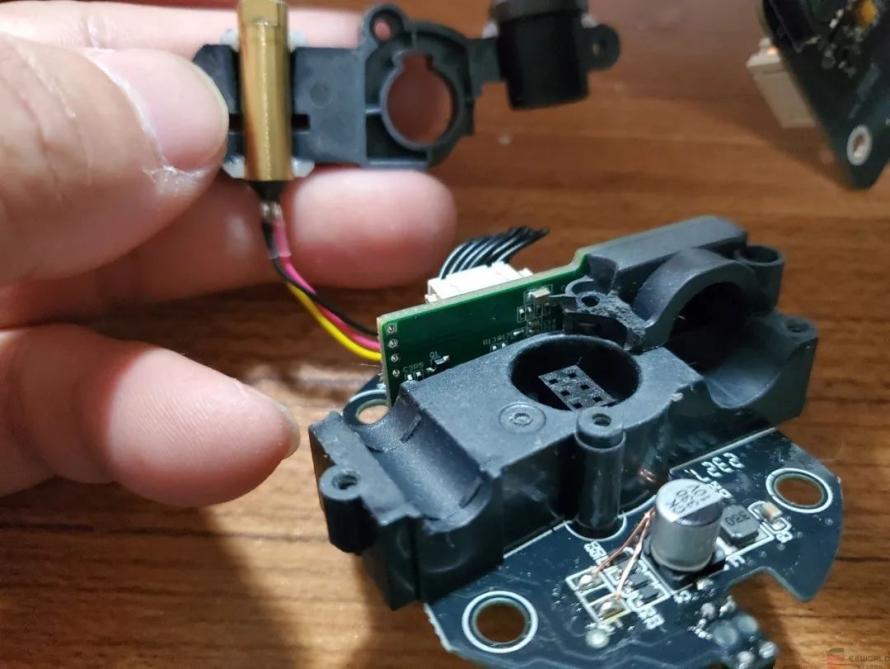
雷达在这个白色地方一直旋转,上面只有两根线
从小板出来的那两根线,是连接到这个里面中心的位置,看样子像红外发射装置。是不是用这个来传输数据呢?那供电与数据都使用这两根线吗?

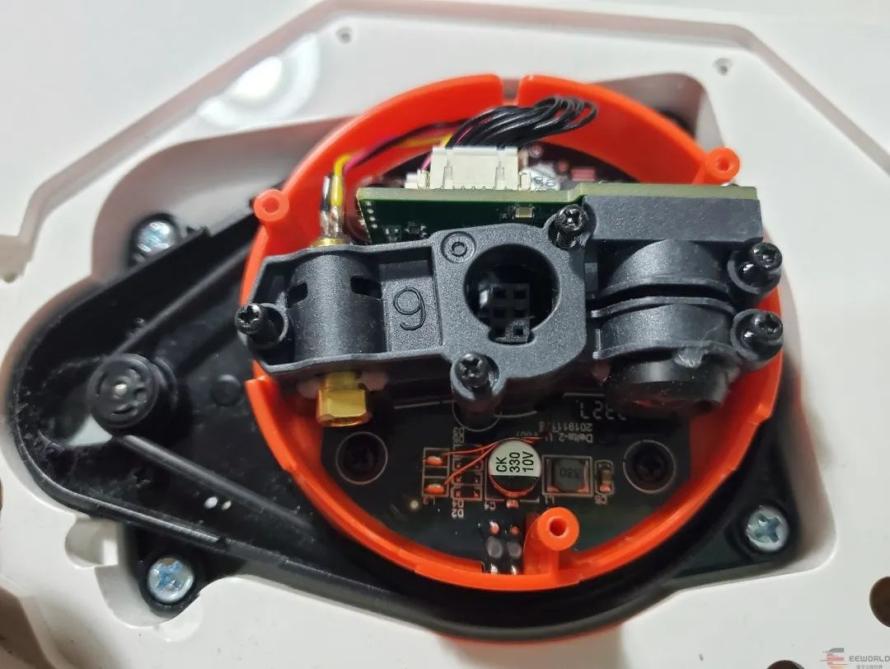
整块雷达装在这个红色壳子里。
红外线激光。

内部,感觉像摄像头。
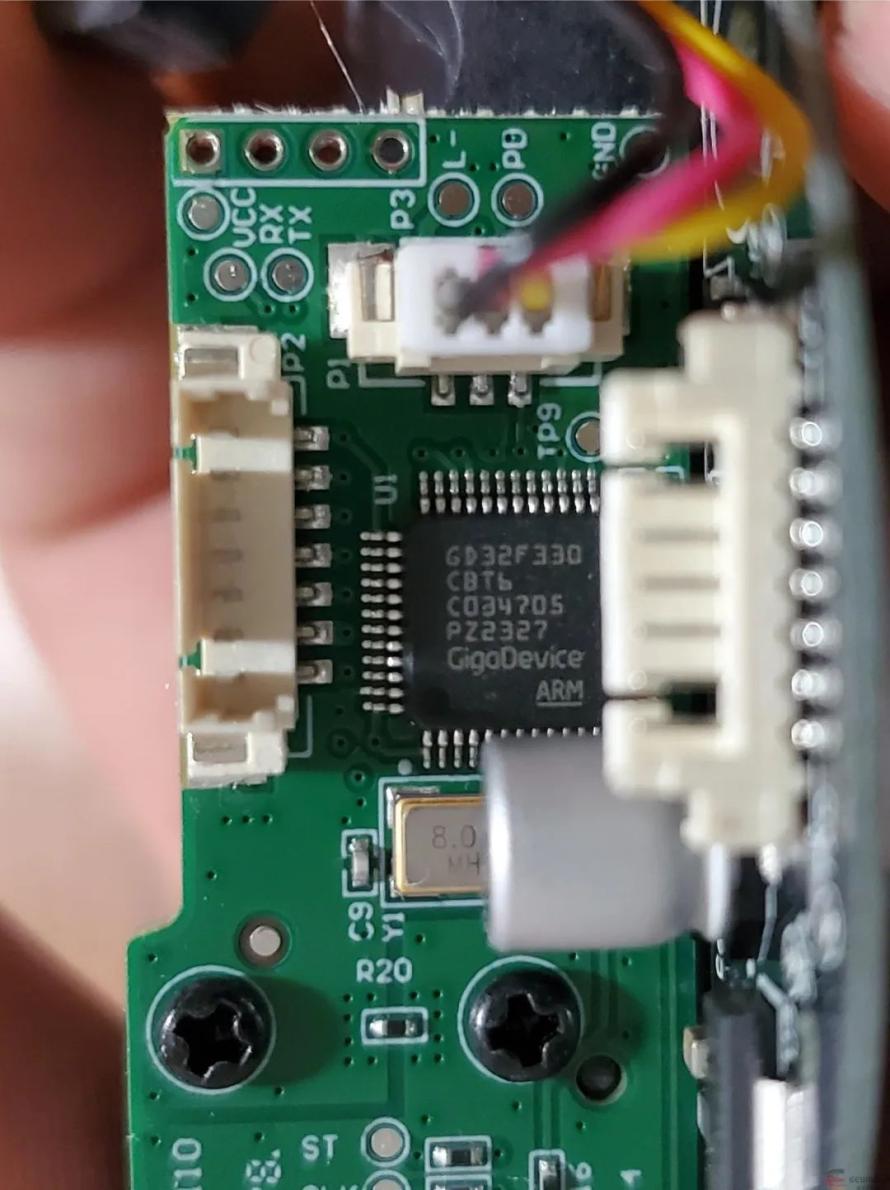
芯片,GD32F330CBT6是一颗CD32ARM Cortex-M4微处理器,品牌是兆易创新GigaDevice,PWMGD32F330xx器件属于GD32 MCU系列的值线。它是基于Arm@的新型32位通用微控制器Cortex@-M4RISC内核在增强处理能力、降低功耗和外围设备方面具有最佳的性价比。Cortex-M4核心功能实现了全套DSP指令,以满足数字信号控制市场对高效、易于使用的控制和信号处理能力的需求。它还提供了强大的跟踪技术,以增强应用程序安全性和高级调试支持。GD32F330xx设备采用了Arm CortexP-M4 32位处理器内核,工作频率为84 MHz,Flash访问零等待状态,以获得最高效率。它提供高达128 KB的片上闪存和高达16 KB的SRAM存储器。连接到两条APB总线的各种增强型1/O和外围设备。这些设备提供一个12位ADC、最多五个通用16位定时器、一个通用32位定时器、PWM高级定时器以及标准和高级通信接口:最多两个SPI、两个I2C、两个USART。该设备由2.6至3.6 V电源供电,可在-40至+85°C的温度范围内用于6级设备,或在-40至+105°C温度范围内可用于7级设备。多种节能模式为唤醒延迟和功耗之间的最大优化提供了灵活性,这在低功耗应用中是一个特别重要的考虑因素。上述特性使GD32F330xx设备适用于广泛的应用,特别是在工业控制、电机驱动、用户界面、电源监控和报警系统、消费类和手持设备、游戏和GPS、电动自行车等领域。
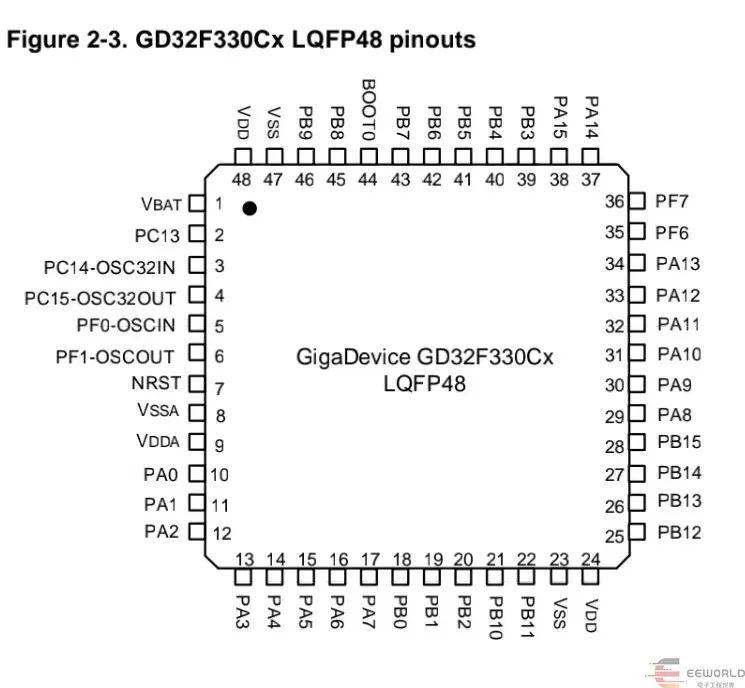
GD32的引脚图

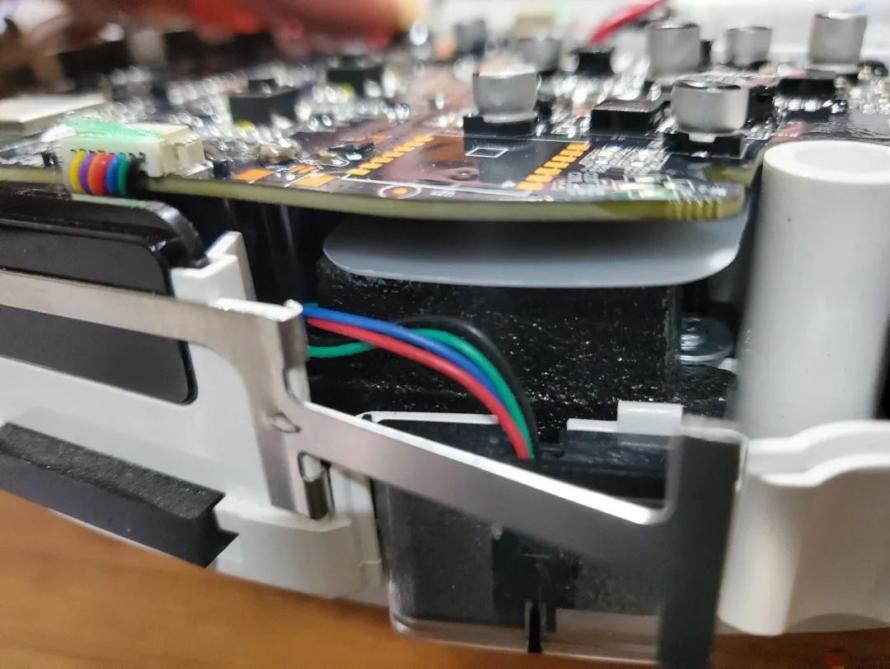
设计紧凑,两块主板使用排线连接。

镜头内部。

镜头部分,上面有镀膜。

拆了一半,螺丝已经这么多了。
装回去,一个黄色的垫片,刚开始掉落出来,我没找到安装位置,原价是主板装好后再装这个垫片。

雷达装回去,朋友讲装回去干嘛?不还是扔,然后我就不装了。
驱动和主板解析
上半部分结束,雷达通讯,与电源,是怎么传输,没搞明白,欢迎有懂的大佬一起讨论下,或者描述有错误的,多多指出,下次研究下半部分的驱动与主板。(原贴地址:https://www.eeworld.com.cn/aSKCOeH)
持续拆解小米S10的扫地机下半部分,主机部分。
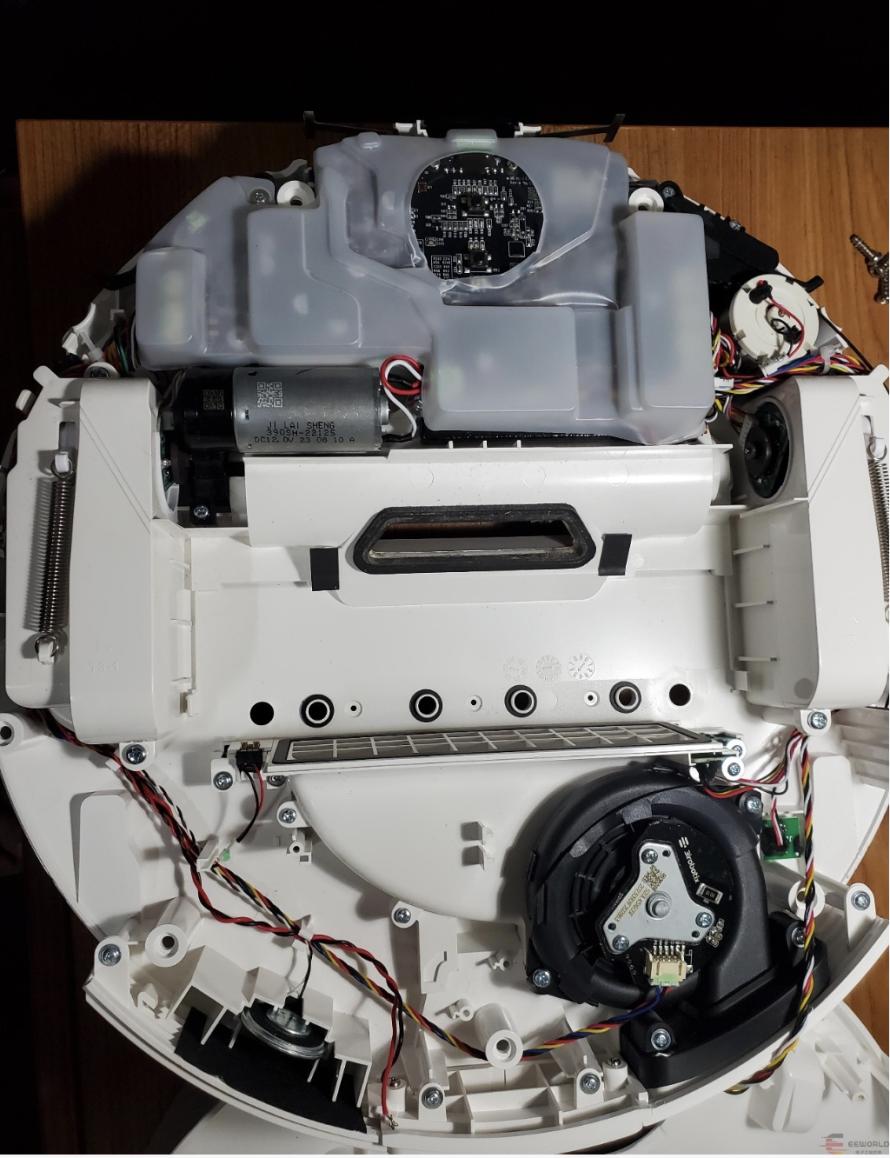
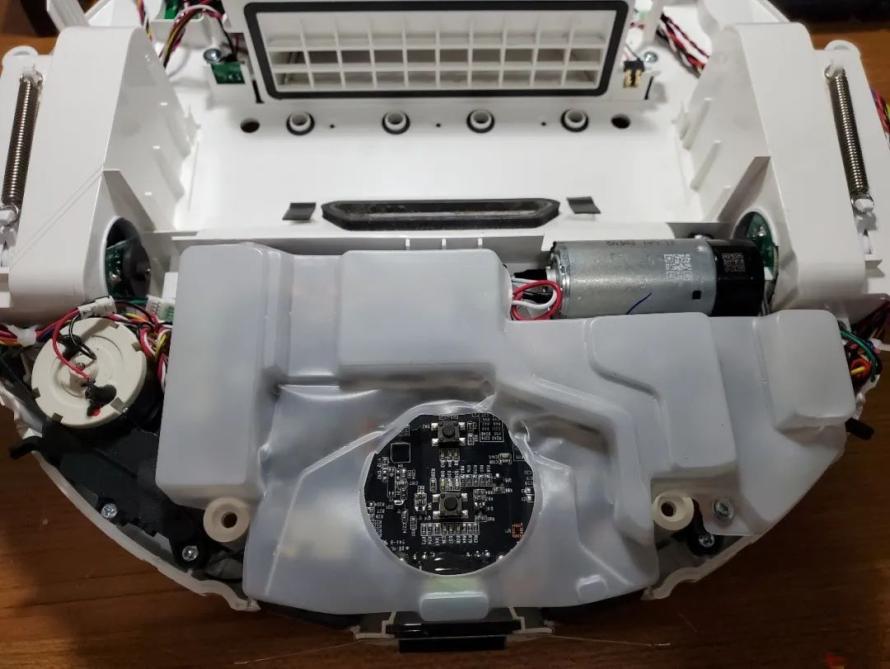
整个下半部分非常紧凑。
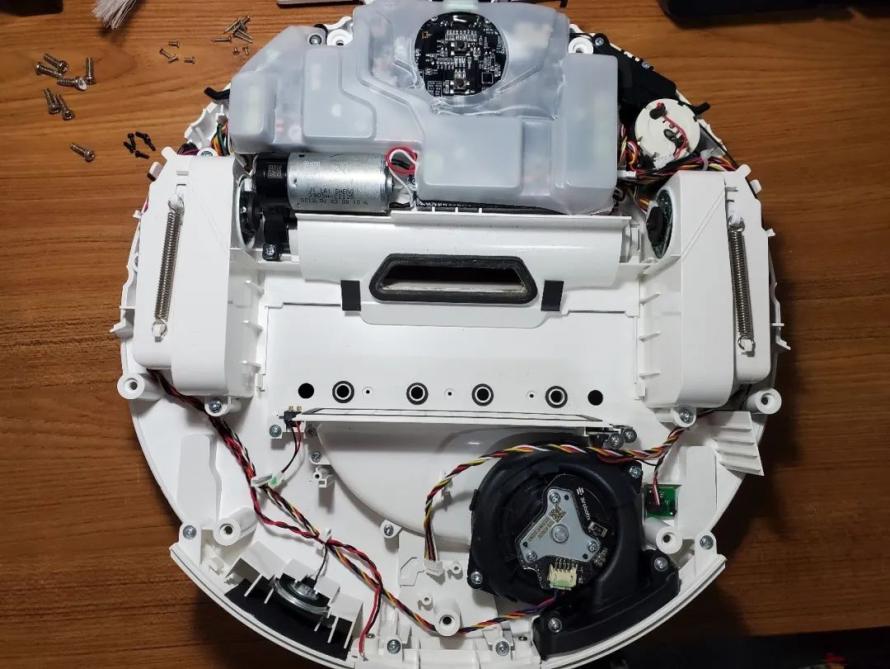
左右为驱动,黑色为吸尘马达,右上角扫地马达,左边长长的是吸尘前方的清扫。

先看下吸尘的,涡轮马达,生产日期20230901,主板上印刷的Birobotix,但是这个标志没找到是哪家。
马达主要提供强劲的吸力,来吸附地面上的灰尘。
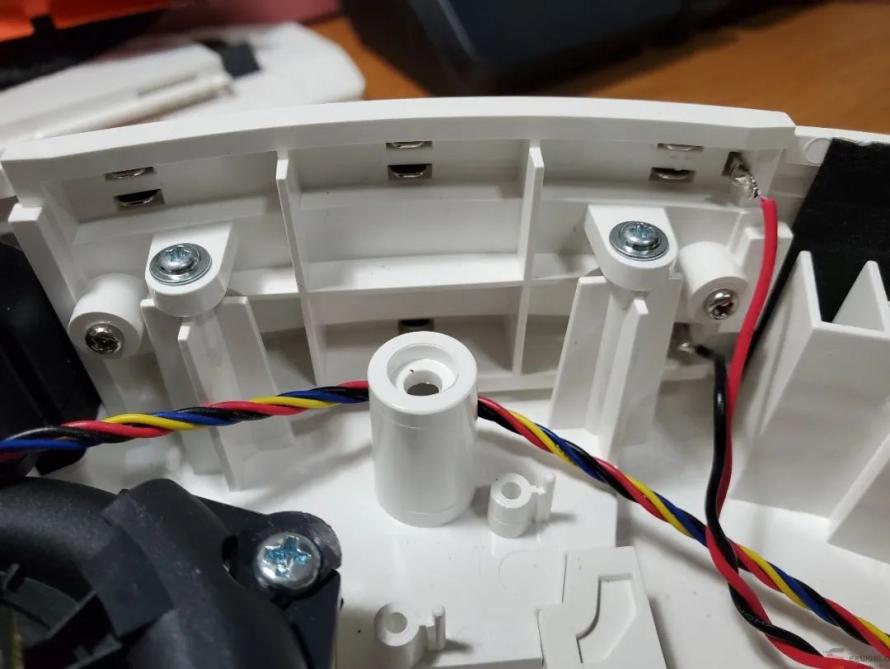
这两根线,给扫地机充电的接口。
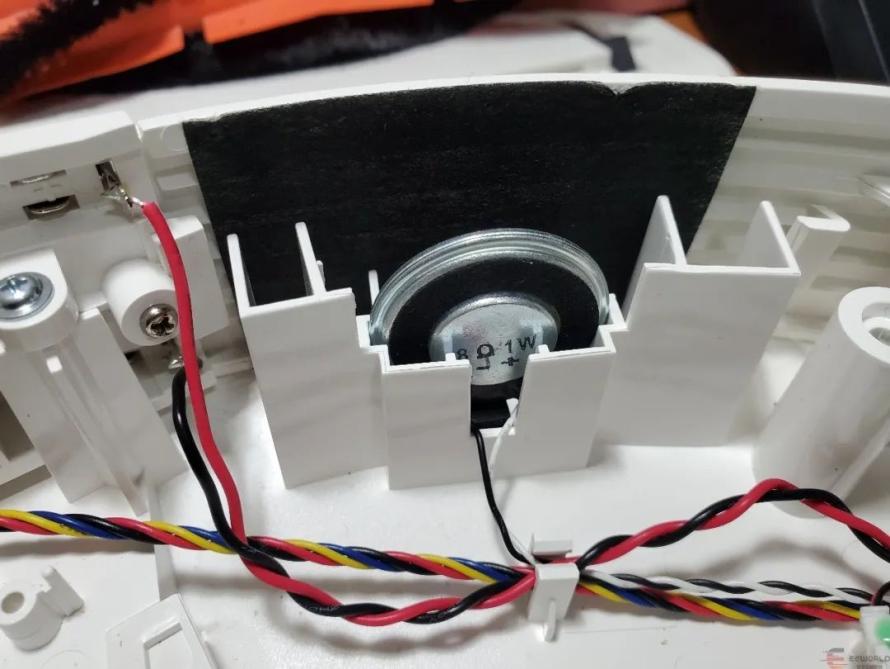
扬声器,8Ω,1W,扬声器也有防尘设计。
这个应该是水箱的供电。
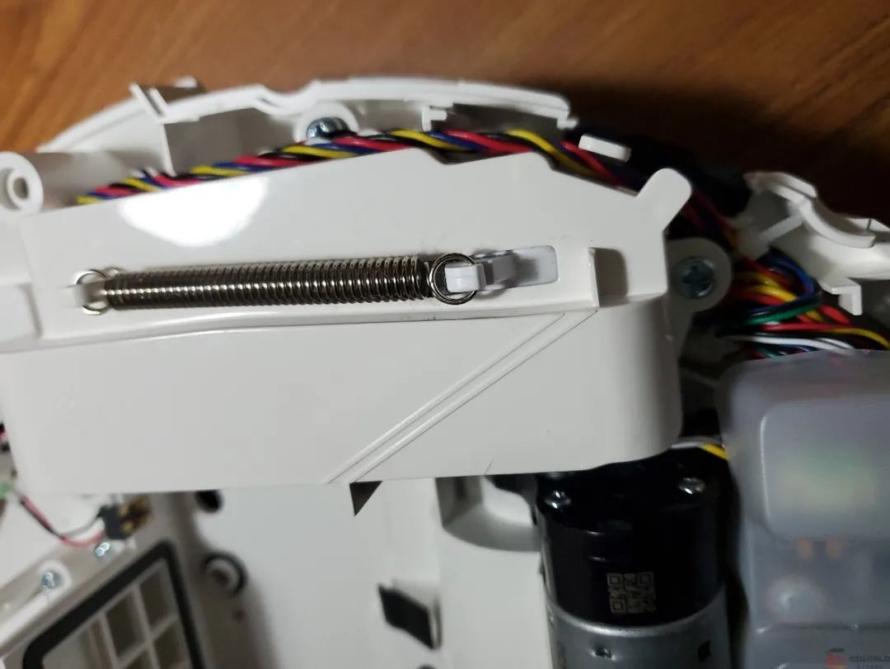
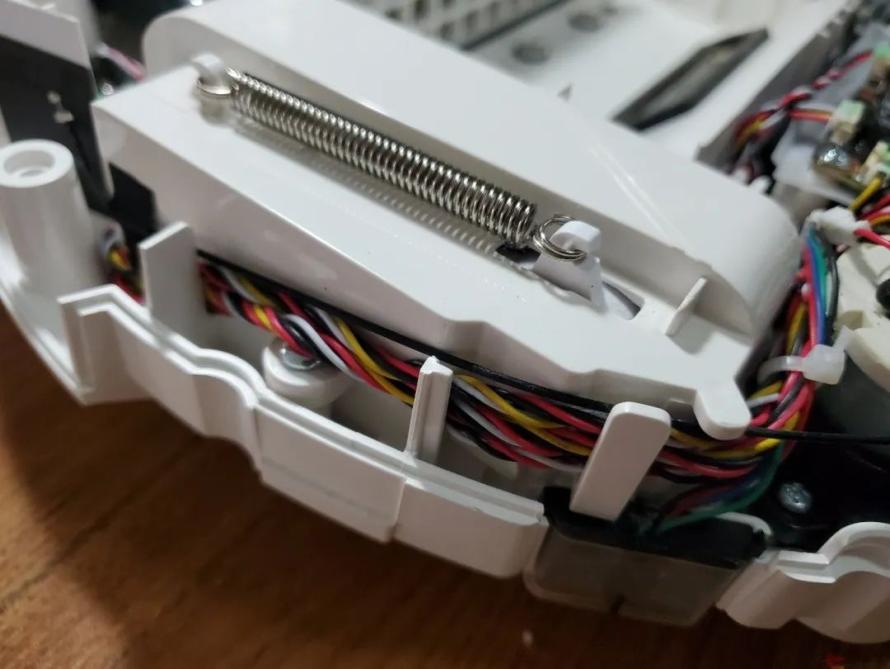
驱动轮,使用一根弹簧拉住,抬起来,弹簧会落下。

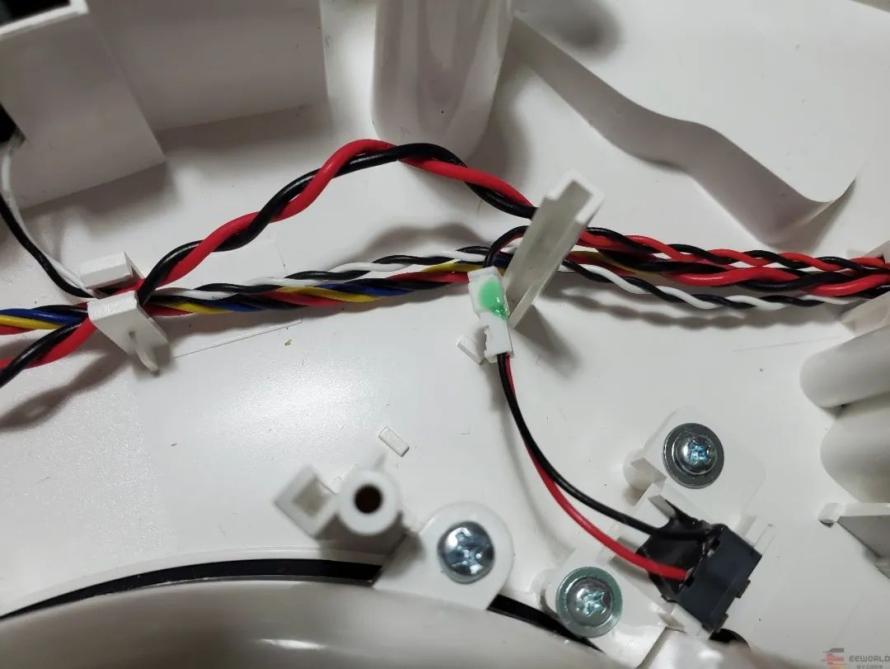
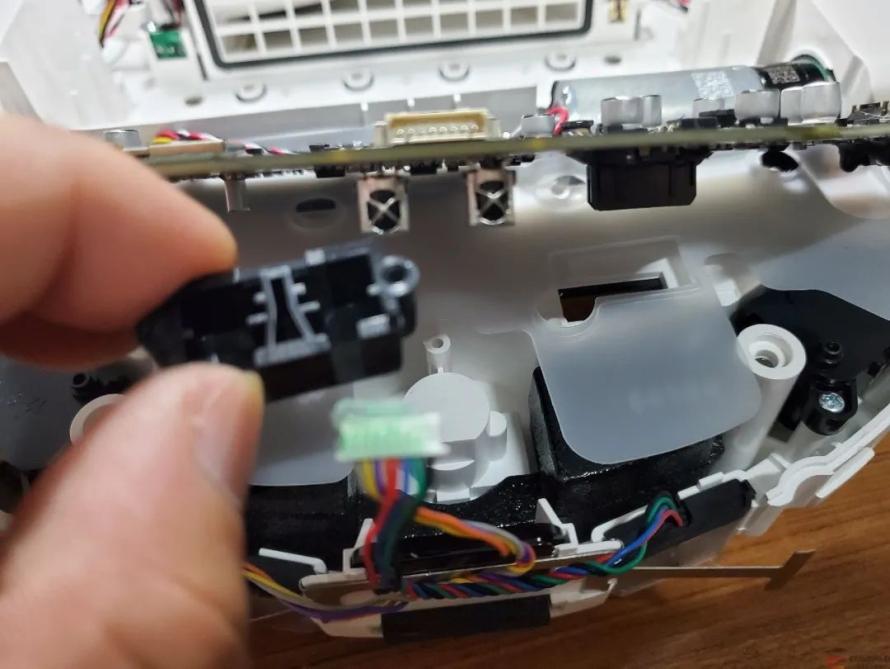
很多接口的排线都汇集在这里,链接到主板。

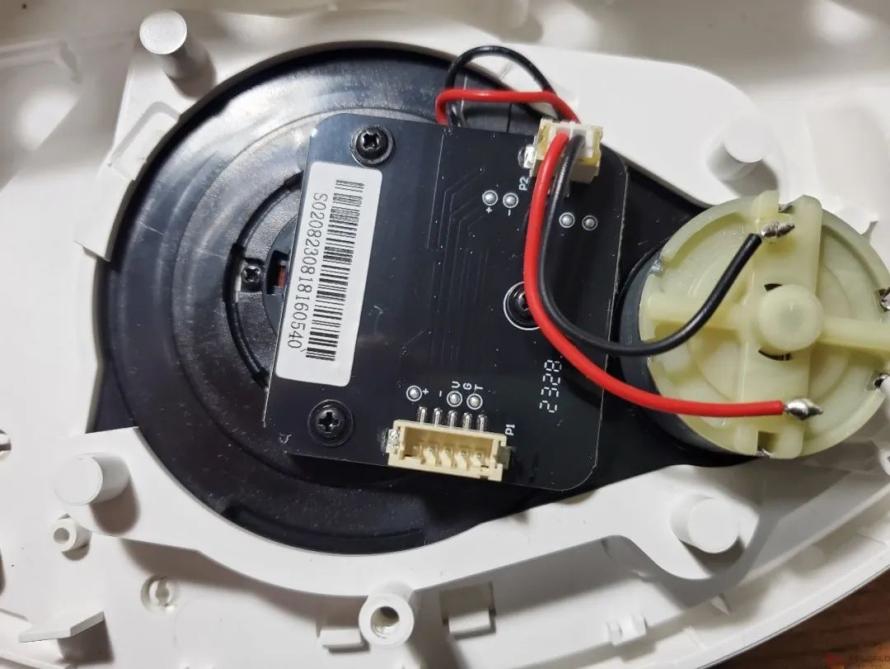
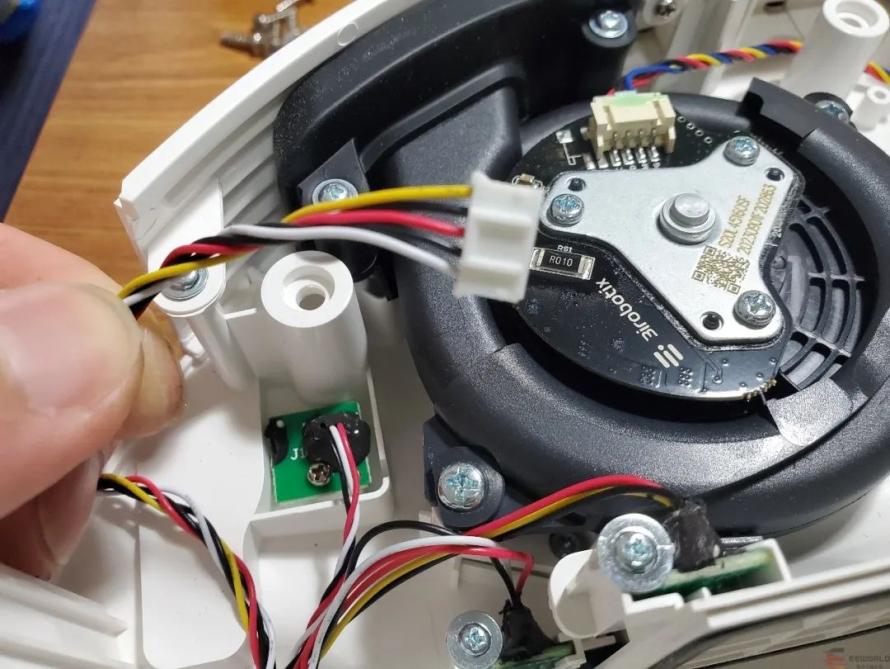
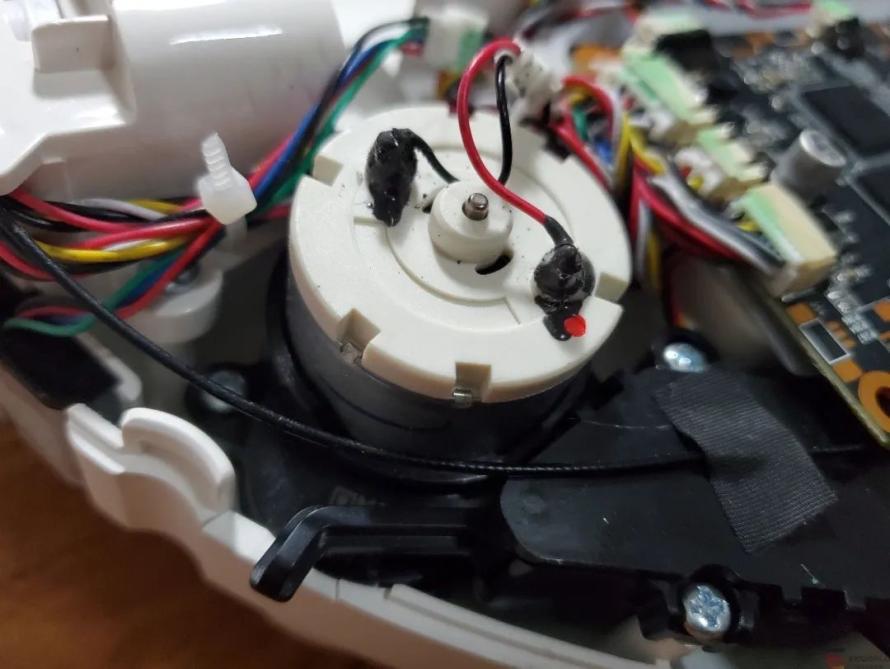
驱动轮使用这种很厚实的橡胶材料。后面圆形的马达驱动板,转动的话,中间的黑色也跟着转。
这一块圆形电路板,位于驱动轮后面,它其实就是驱动轮电机的霍尔传感器模块,也就是速度/里程传感器,作用是给扫地机器人提供车轮的转速和转动方向反馈。
元件与作用
中间圆盘(黑色圆盘)
这是与驱动轮电机轴相连的磁钢盘(也称磁环),上面有南北极交替分布的磁极。
电机旋转时,这个盘也跟着转动。电路板上的元件(标有 U1、U2 之类的器件)
电路板上有若干个霍尔元件(Hall sensor),这些元件能感知磁盘旋转时磁场的变化。
板上的电容(C 开头)与电阻(R 开头),用来滤波、整形信号。连接线束
电源(给霍尔传感器供电),地线(接地),信号线(向主板发送轮速脉冲)。
工作原理
电机驱动轮子旋转时,这个圆盘跟着一起转,霍尔传感器通过感应磁场切换频率,输出脉冲信号给主板。主板据此换算出速度、行驶里程,还能判断是否卡住或打滑,这就是扫地机能校准方向和路径的重要反馈源。

所有的排线,在主板正反面都有接口。
这组线链接上方雷达的。

这三根线,没明白是做什么用的。

还有这两组,都不知是什么作用,是检测集尘盒里的灰尘吗?
只是一个开关管元件,为啥要单独拿出一个小板,可能不是开关管,是检测元件。

机器人的WiFi天线,CC-1S-WIFI-V2。用于数据,远程控制。
另一边的轮子,这边排线比较多。
主板上方有防水层,设计的凹槽,方便有水会流到外面。

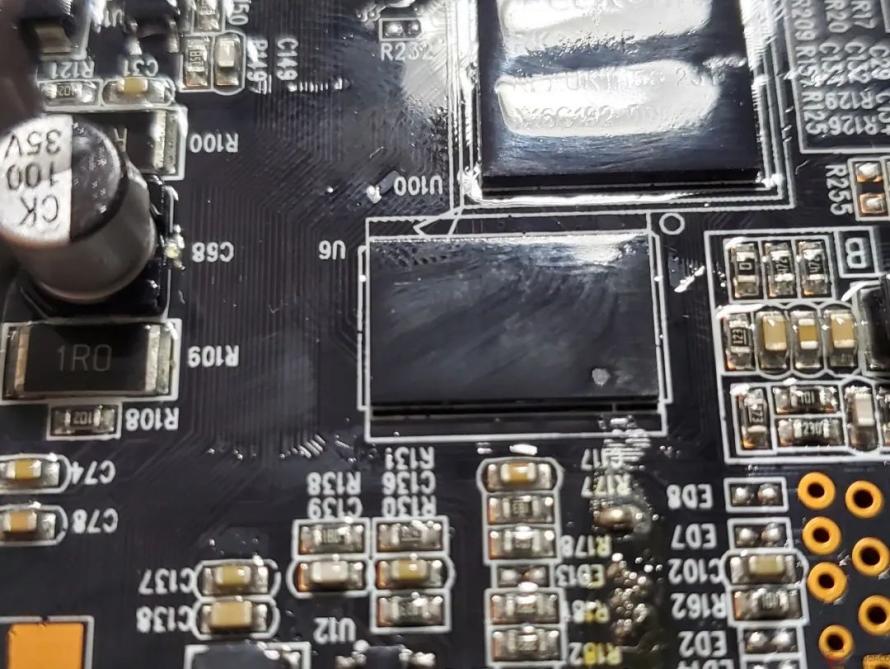
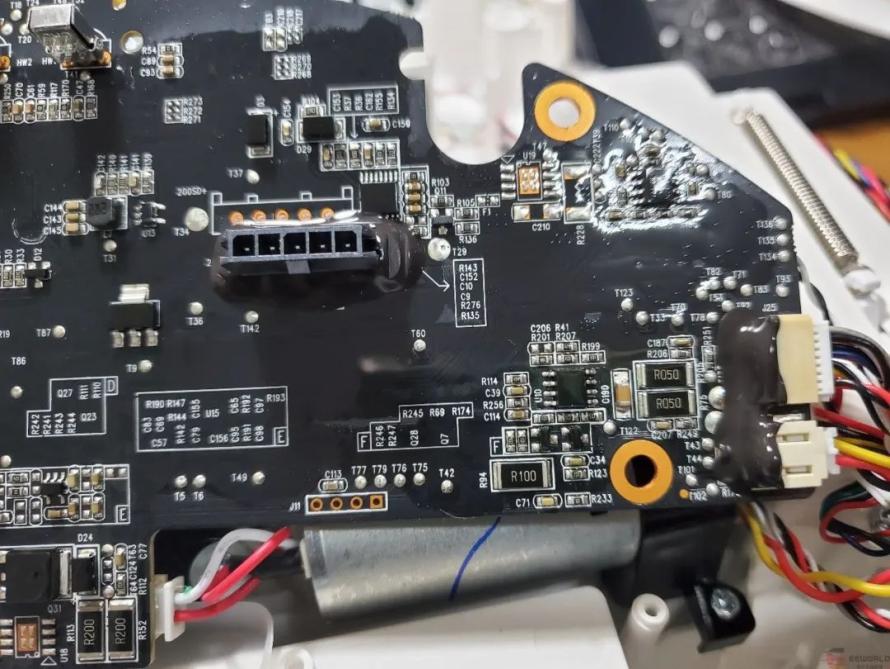
取下防水层,整块主板,集成度非常高。左右接口,中间偏左为芯片部分,右边大部分为控制部分。

底部吸尘扫地的马达来自ji lai sheng,12V直流,生产日期230810,型号390SH-22125。

马达的连接处,都做了打胶固定。

整块主板都做了打胶处理,防水。
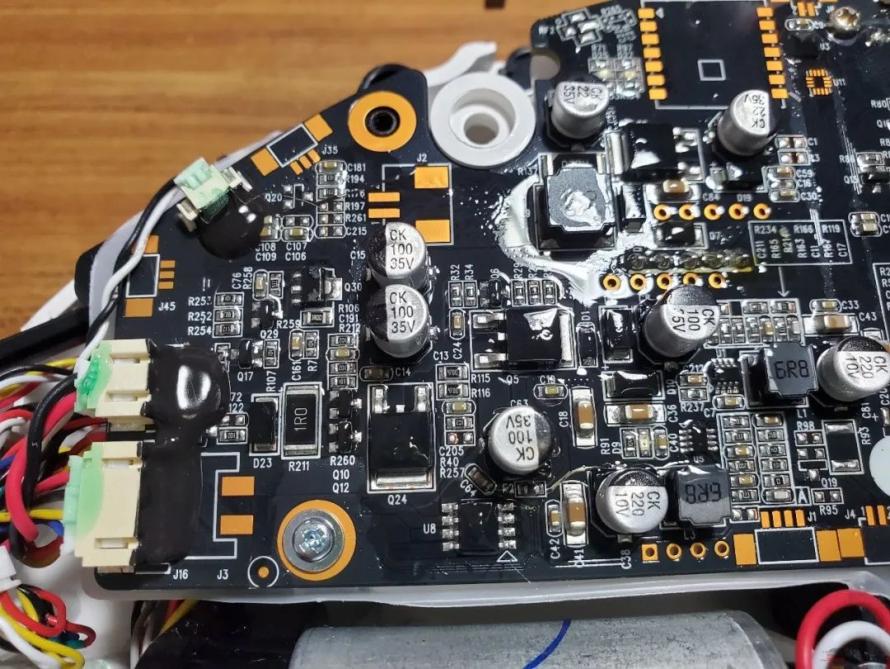
可以看到很多元件,可能是更新换代了,导致用不到,或者更换了元件,就会有一些没有安装的点位。
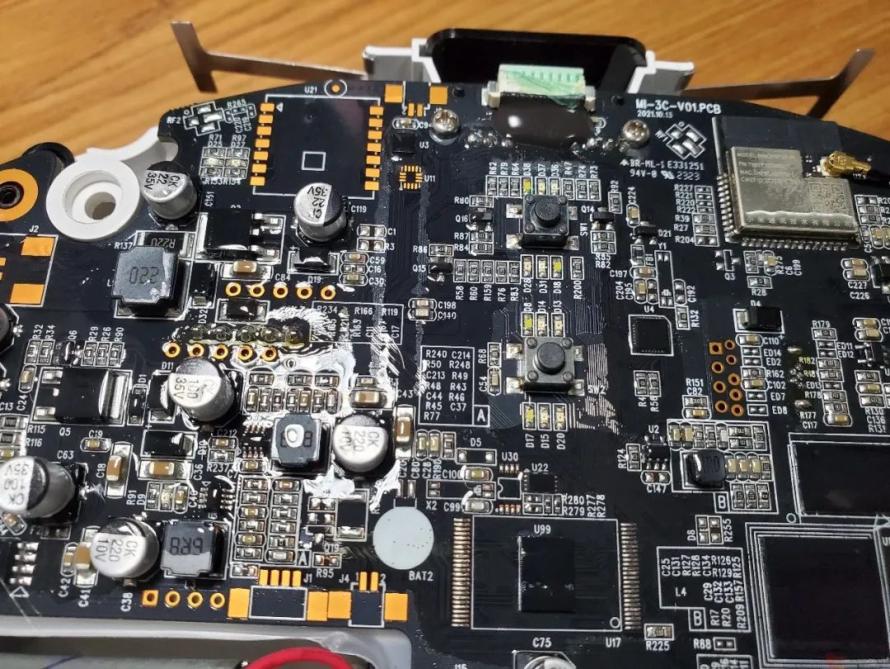
U99应该是个硬盘吧,更集成化了。
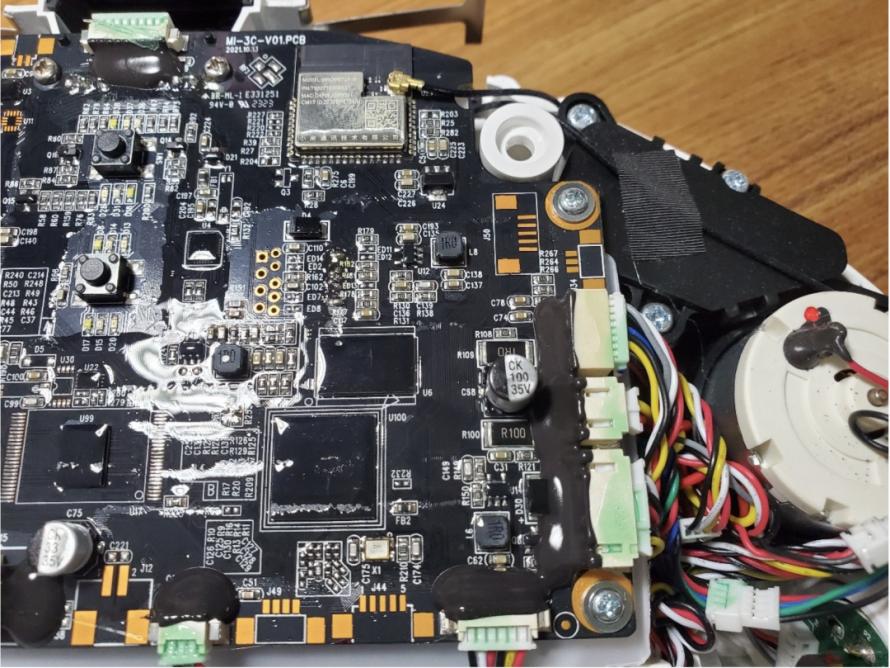
U100,主控,U6为闪存,
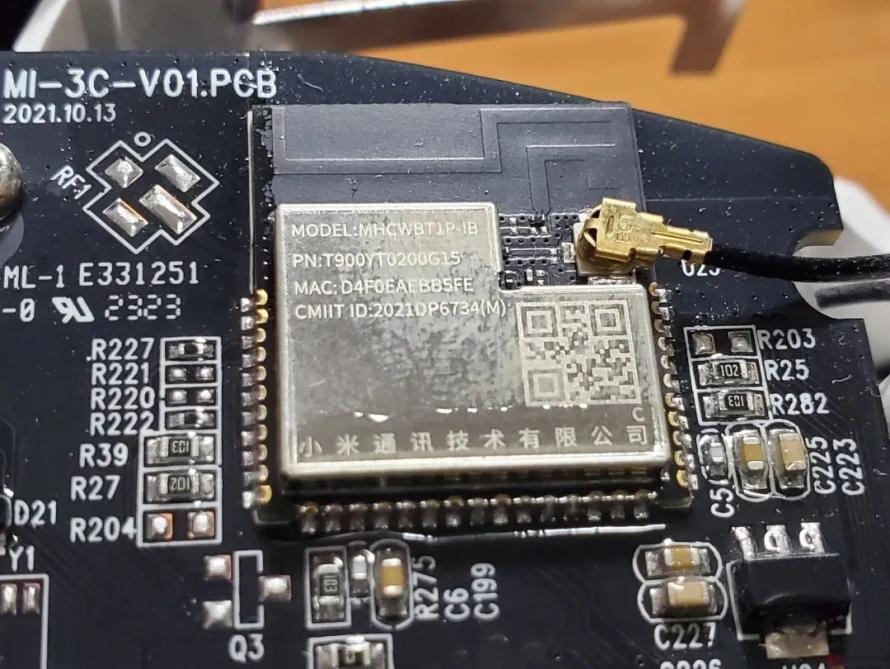
小米的WIFI.模块,自家生产的,型号,MHCWBT1P-1B生产日期应该是2021年,底部有小米通讯技术有限公司。右上角有天线。

主板PCB版本,M1-3C-V01.PCB,2021.10.13

接着看另一边的排线,这个是右边的感应器,四根线连接。
右边的碰触开关,碰到后,会改变马达运行方向。

正前方的,感应器,还有弹簧片,用来复位碰触那块大的塑料壳。

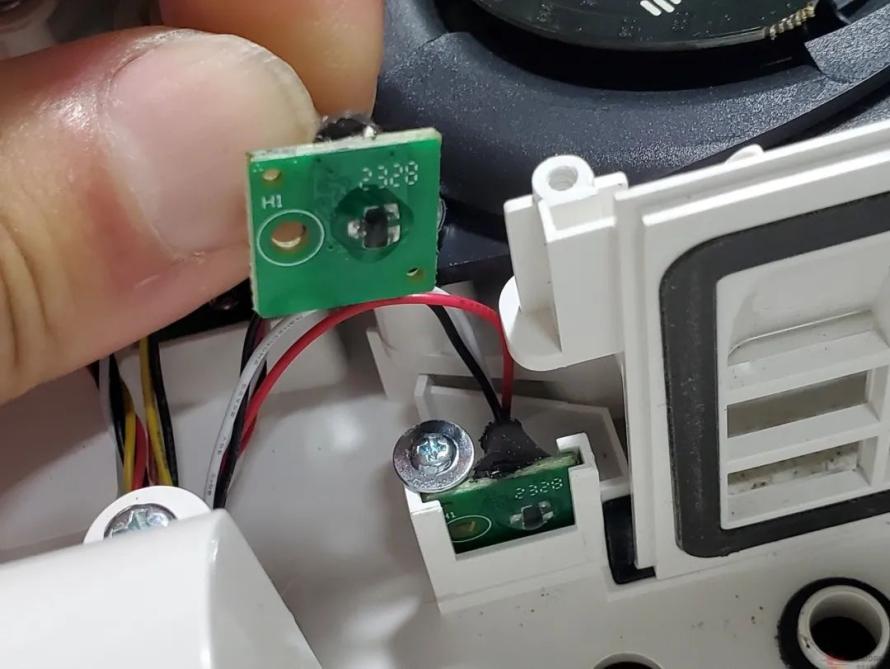
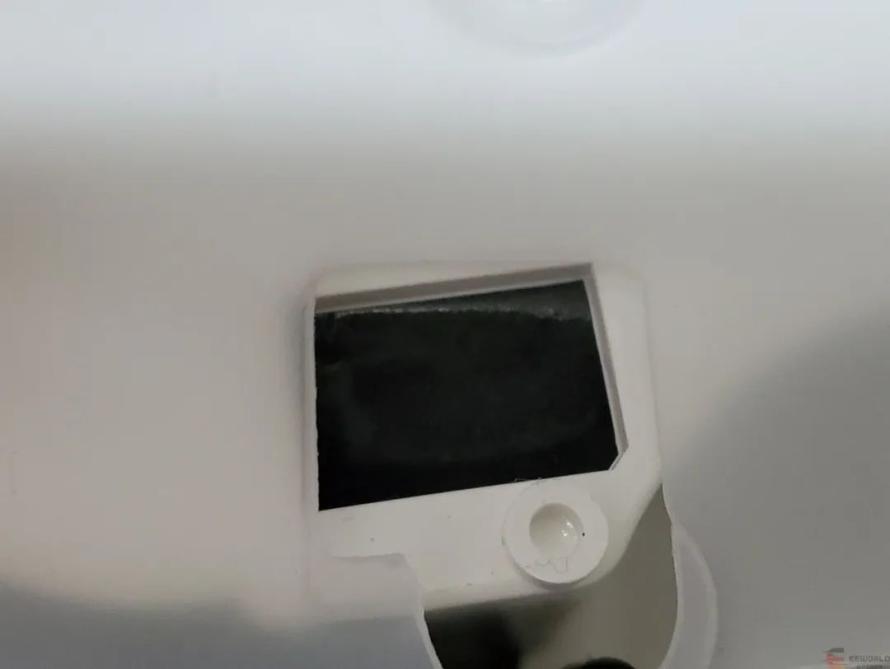
正前方的感应器。是红外探测器。

机身一共有4个感应器,如遇见楼梯,触发后会立即改变驱动轮方向。往后走,或者侧边。

另一边的触碰开关。

感应器。四组的颜色都不一样,可以区分开来。
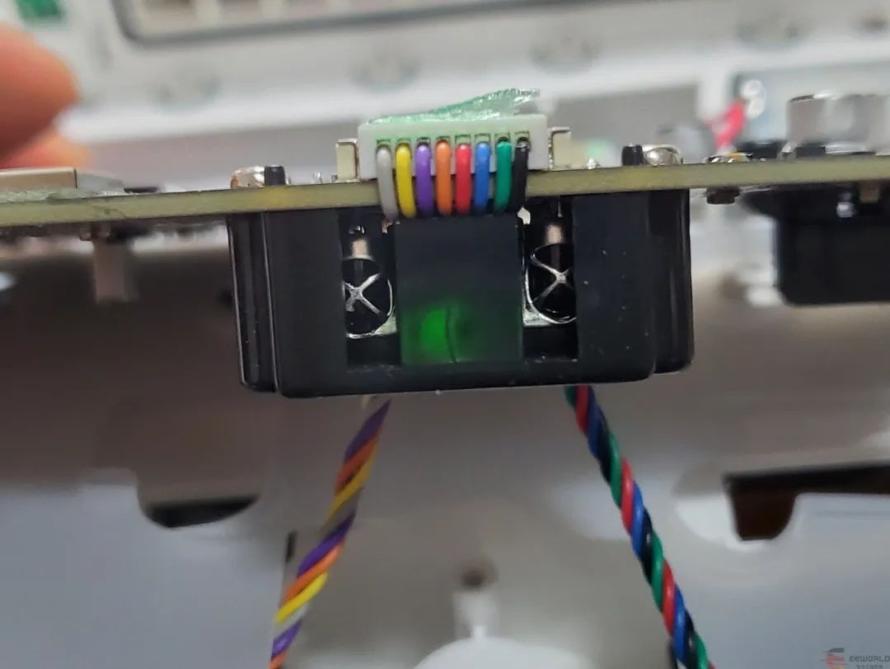
正前方的红外探测器。是两颗红外。
需要拆开底部壳子,才可以取出来。
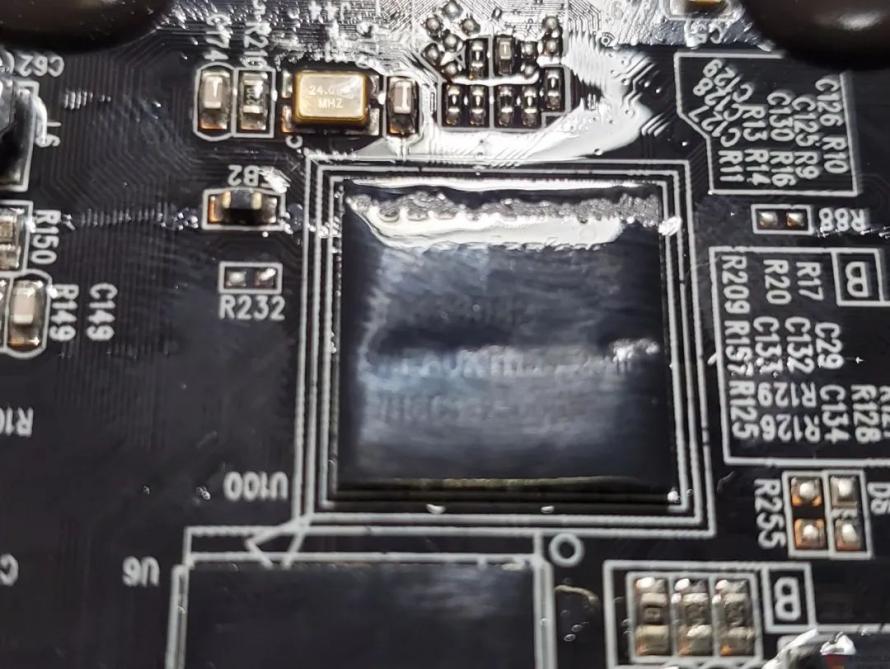
U100,看不出任何型号。U6,也是看不出。
全部使用胶水浇筑了,看不出任何型号。
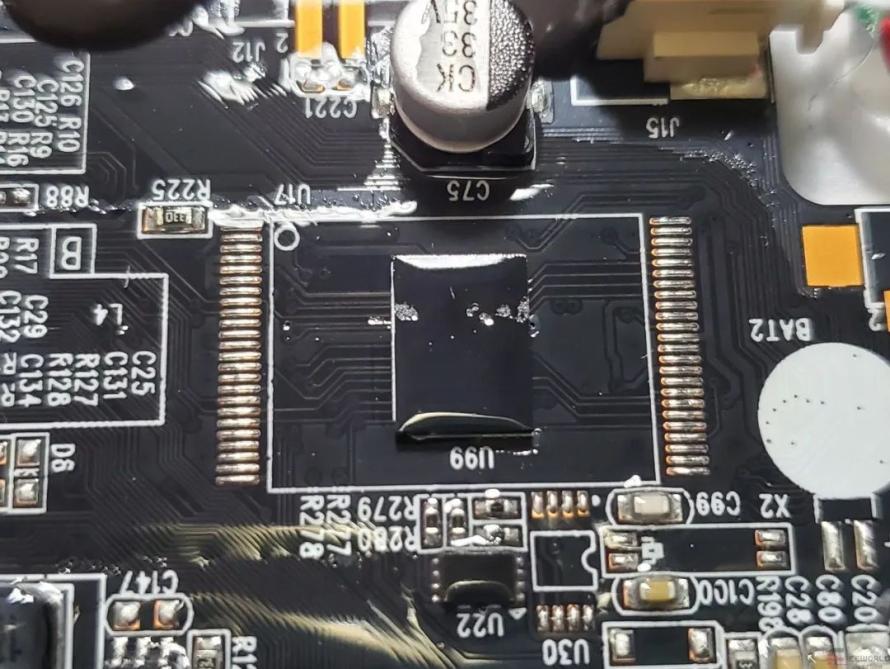
U99可以看到,原来的封装比较大。
取下两个红外的壳子。
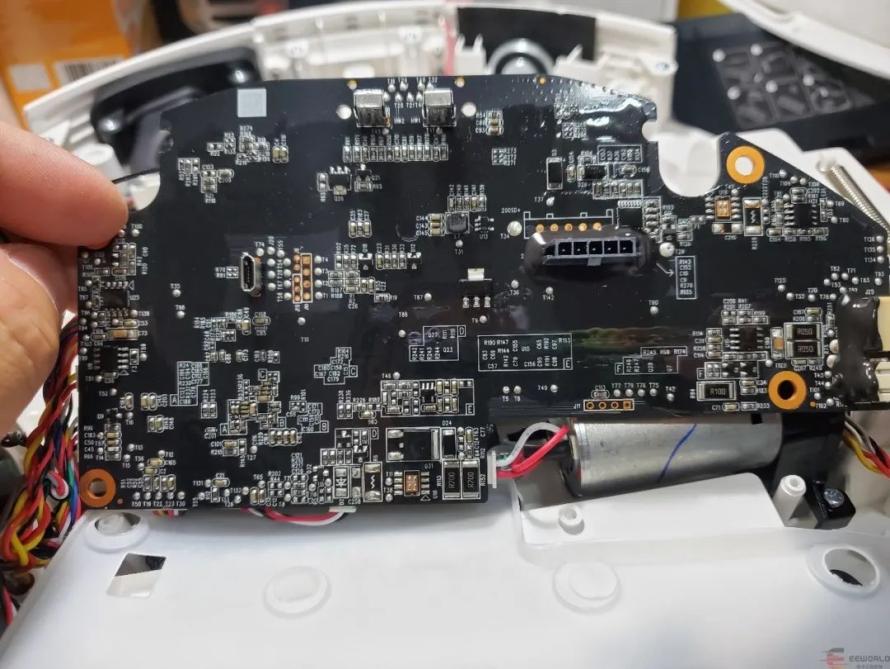
整块主板背面,也有不少芯片。
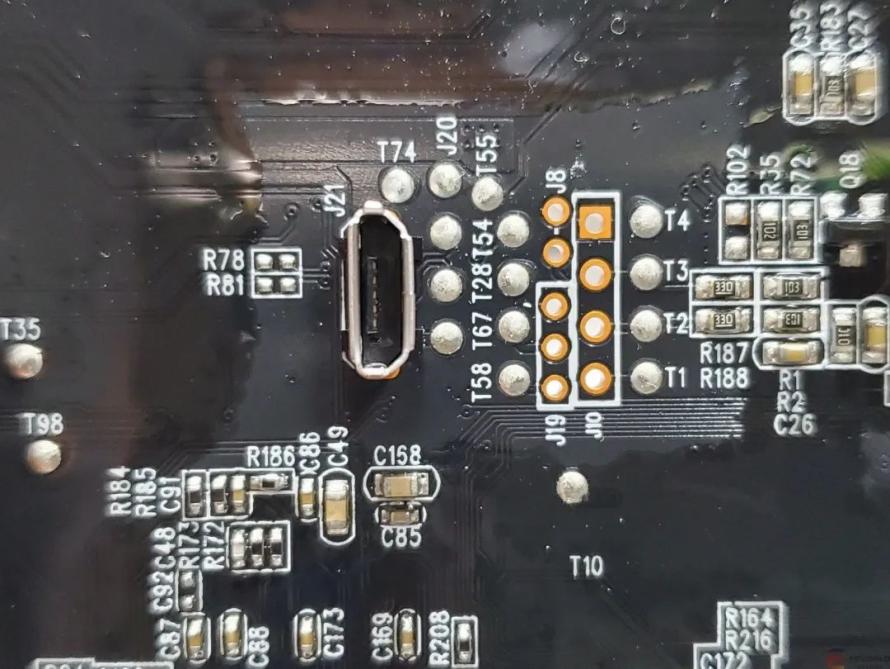
USB接口,旁边的调试点。
接口与USB,对应这个黑色标签,用来遮挡住接口。
电池接口是直接焊接在主板上,接口后面也有对应的5个端子接口。

两颗红外元件,红外发射二极管(IR LED) 会向前方发出红外光束。
红外接收器(Photodiode 或 Phototransistor) 接收从前方物体反射回来的红外光。
通过接收到红外信号的强度,机器人可以判断前方是否有物体以及与物体的距离。
实现防撞、自动转向以及避免掉落(如楼梯边沿)的功能。
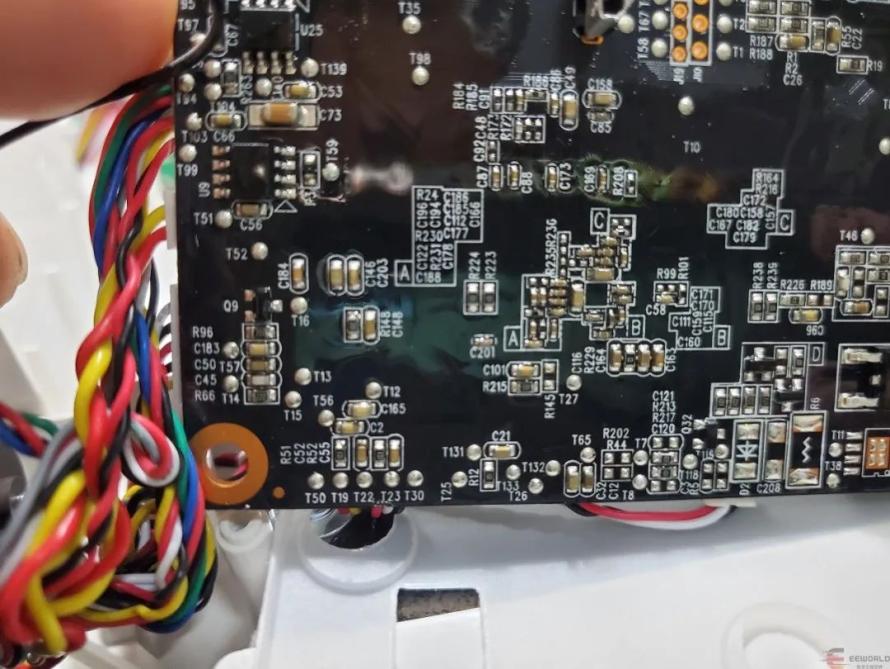
主板背面
扫地机的清扫轮马达,不过这个扫地机是一个清扫轮,我印象中都是两个,往中间扫。
马达的连接线焊接点,也使用很多胶固定。

另一个马达驱动
跌落传感器。

全部元件,大概就这样了,芯片与电源,基本上都看不清。整机用料,非常小米。
全部元件,我想装起来再丢掉,朋友讲反正都是丢,不用装了。直接都装袋子里,丢掉就好。
电池没有丢掉,保留下来了,其他的都扔掉了。
最后大概总结下。

电源管理模块
功能:负责从锂电池输入转换出各个子系统所需的电压(如 5V、3.3V)。
芯片类型:常见 DC-DC 降压芯片、充电管理芯片、过流过温保护电路。
主控 MCU(微控制器)
功能:整机逻辑控制中枢,负责各传感器数据处理与任务分配。
常见芯片:可能是 ARM Cortex-M 系列微控制器,比如 STM32 系列,或者类似 ESP32 用于网络。
电机驱动模块
功能:分别控制驱动轮电机、主刷电机、边刷电机、风机等。
元件:功率 MOS 管或电机驱动芯片(如 DRV 系列),以及对应的电流检测电路。
传感器接口模块
包括多个接口用以连接:
激光测距传感器(LDS 激光雷达)
碰撞传感器、红外测距模块
悬崖传感器、防跌落红外
霍尔传感器(测速反馈,驱动轮旁边那个圆形电路板)
陀螺仪模块(测方向旋转角度)
通信模块
Wi-Fi 模块:实现联网控制,比如通过米家 App 实现远程控制
以上就是小米S10扫地机全部拆解了,下次随机拆吧,哈哈,我属于捡到啥拆啥,有个22寸显示器,本来要拆,结果上电后正常,卖给另一个朋友了,40块钱。。。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




