清华大学:超轻、超小的柔性六维力/力矩传感器,助力指尖灵巧操作
来源:MEMS
发布时间:2025-07-08
近日,清华大学精密仪器系朱荣教授团队在《自然·通讯》(Nature Communications)上发表了题为“An ultralight, tiny, flexible six-axis force/torque sensor enables dexterous fingertip manipulations”的研究论文,报道了一种超轻 (0.30 g)、超小 (指尖大小)的柔性六维力/力矩传感器,将传感器用于指尖的灵巧操作,实现多维、多任务的操控以及人机协同,显著提高智能机器人、家庭服务等领域的操控灵巧性。
研究背景与成果
人类利用手指可以完成快速、稳健且灵活的操作任务,指尖被认为是极其敏感的部位,能够快速进行按压、滚动和滑动等动作。指尖上的多维力/力矩感知能够为人类或机器人提供强大的操作能力,即使对于行动不便的人群,如残疾人和老年人,也能通过指尖操控,灵巧地控制轮椅等生活设施。智能机器人对于多维力/力矩感知的需求尤为迫切,机器人在完成灵巧操作比如开瓶盖时,不仅需要法向力的感知,还需要切向力的感知。当前的六维力/力矩传感器存在着结构复杂、加工工艺繁琐、体积较大、柔性程度不足等问题,限制了六维力/力矩传感器的广泛应用,尤其是在指尖灵巧操作上的应用。
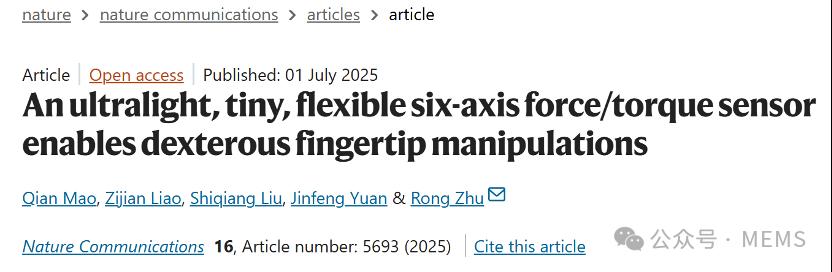
针对以上问题,清华大学精仪系朱荣教授团队提出了一种结构简单、体积小(指尖大小)、重量轻(0.30 g)的柔性六维力/力矩传感器。该传感器利用叠层分布的薄膜热敏电阻来感知柔性压热材料的空间应变,实现六维力/力矩的宽量程、高精度的柔性感知。团队将传感器用于机器人灵巧手的指端,实现对物品的精细操作,并将传感器用于人类指尖,可以实现灵巧地多维、多任务操作,例如行动不便的残疾人和老年人,可以通过指尖操作实现远程遥控、人机协作的物品抓取及收纳等复杂家政任务。
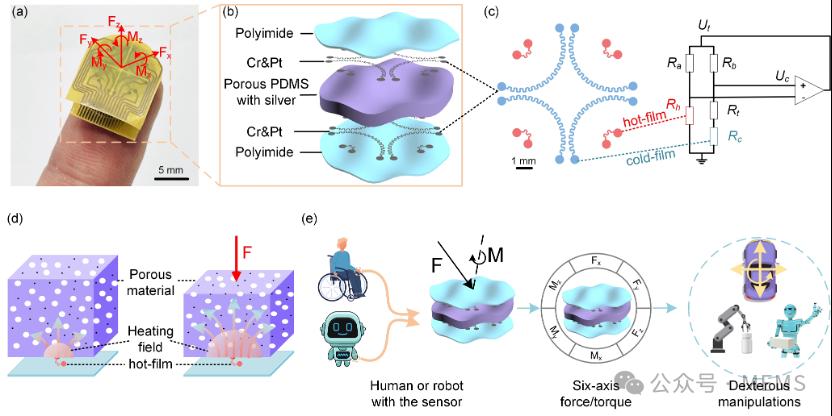
图1. 超轻、超小的柔性六维力/力矩传感器及其灵巧操作应用
成果优势
柔性传感器采用紧凑的叠层设计,柔性压热材料的上层和下层分布有薄膜热敏电阻,在六维力/力矩作用下,柔性压热材料产生空间应变,被分布于上层和下层的薄膜热敏电阻检测。由此,利用简单的热敏检测结合压热效应,即可感知空间应变,最终实现六维力/力矩的精准感知。该传感器结构简单、体积小、重量轻,六维力/力矩的法向力(Fz)、切向力(Fx和Fy)、力矩(Mx和My)和扭矩(Mz)的量程分别为15N,-5~5 N, -60~60 mN·m和-20~20 mN·m,均方根误差(RMSE)分别为0.18 N, 0.15 N, 0.18 N, 0.58 mN·m, 0.62 mN·m, 0.26 mN·m,柔性传感器通过了十万次重复性测试仍然保持稳定,且不受环境温度和湿度的影响,该传感器具有宽量程、高精度、高可靠性与高稳定性的优势(图2)。
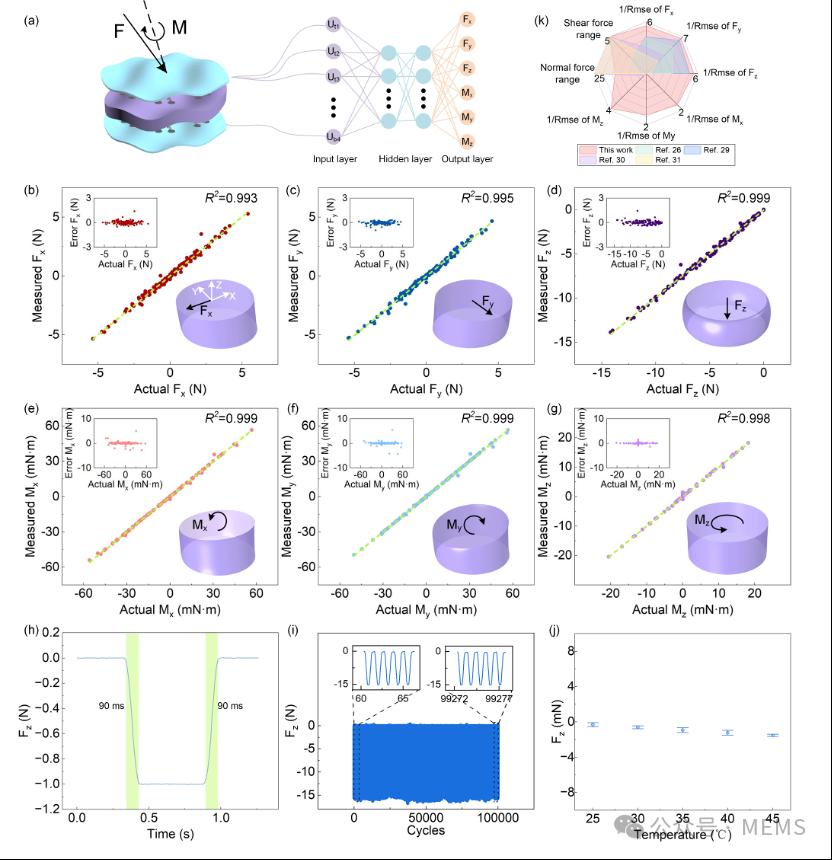
图2. 六维力/力矩传感器的传感性能
团队将多维力传感器安置于机器人的灵巧手指尖,传感器帮助机器人实现了药瓶安全锁瓶盖开启过程的多维力感知(图3),从而协助机器人灵巧操作各类物品。多维力/力矩传感器用于人手的指尖,通过手指的轻轻触碰,即可实现虚拟游戏中多维运动、多项任务的快速、精准操控,大幅提高了游戏操控的快速性、灵活性和准确性,颠覆了传统游戏遥杆和游戏键盘操作不灵活的局限。
图3. 六维力/力矩传感器用于机器人手,开启带安全锁的瓶盖;用于人手指尖,快速、灵巧地操控游戏的多维运动和多项任务
团队还将六维力/力矩传感器用于行动不便的残疾人或老年人的遥操作,将传感器放于人手指尖,通过轻轻地指尖触碰,即可实现对智能机器人的机械臂和机械手的多维运动操控,由此,可以利用简单灵活的指尖操控,实现对智能机器人的完全控制,可操控机器人完成物品的拾取、收纳和搬运,进一步完成家政服务(图4)。
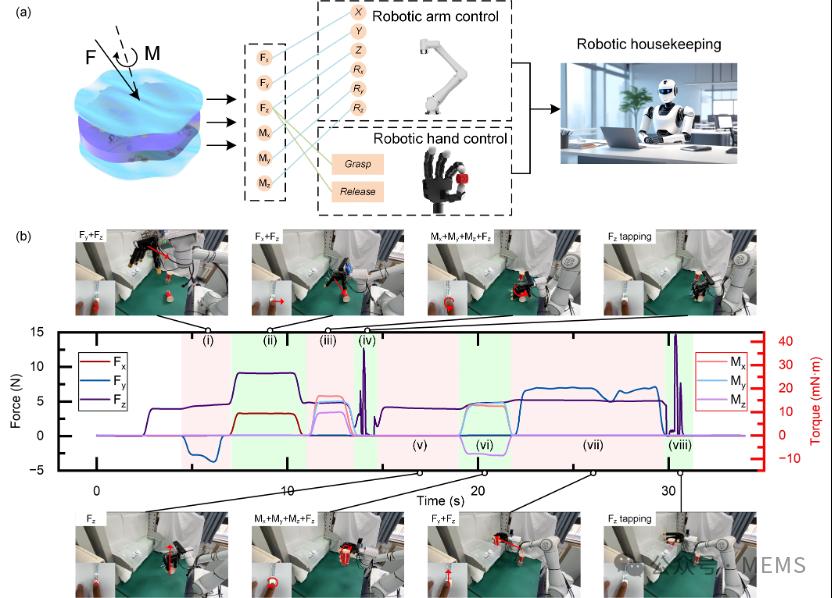
图4. 六维力/力矩传感器助力人手,通过指尖轻触,控制机器人完成家政服务
团队研究成果不仅大幅提升了柔性六维力/力矩传感器的功能和性能,还极大地增强了指尖灵巧操作的能力。随着技术不断成熟和完善,该柔性六维力/力矩传感器有望在更多领域发挥重要作用,推动智能机器人、工业制造、家庭服务、助老助残等领域的长足发展。
该研究的完成单位为清华大学精密仪器系、精密测试技术与仪器全国重点实验室,精仪系2021级博士研究生毛骞为论文的第一作者,通讯作者为精仪系朱荣教授,其他作者还包括精仪系博士研究生廖子健、助理教授柳世强、博士后袁锦烽。本研究受到北京市自然科学基金顺义创新联合基金项目、国家自然科学基金项目的支持。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




