人形机器人关键零部件:传感器全景解析
来源:乐晴智库精选
发布时间:2025-03-25
在人形机器人的供应链中,上游零部件如丝杠、减速器、传感器、电机等都是成本价值占比较高的重要组成部分。
其中,传感器作为人形机器人感知与交互的基础,其技术路线的演变及产业进展备受业界关注。
特斯拉人形机器人Optimus-Gen3的最大亮点在于灵巧手的升级。在最新公布的方案中,灵巧手的自由度大幅提升至22个,这一变化对手部传感器等关键零部件也提出了革新需求。
本文将对人形机器人传感器关键环节、行业壁垒、市场竞争格局和重点厂商等多个维度进行深入拆解。
传感器行业概览
传感器是人形机器人将对内外环境感知的物理量变换为电量输出的装置,主要分布于传感系统。
一般分为内部传感器和外部传感器。
内部传感器:主要用来感知和监测机器人自身的状态参数,以调整并控制机器人的运动。主要包括速度传感器和位置传感器等。
外部传感器:用来检测机器人周边环境、目标的状态特征等,使机器人能够根据不同的环境进行自动校正和自适应调整,如避障和路线规划等。主要包括力觉传感器、视觉传感器、听觉传感器、触觉传感器、温度传感器等。
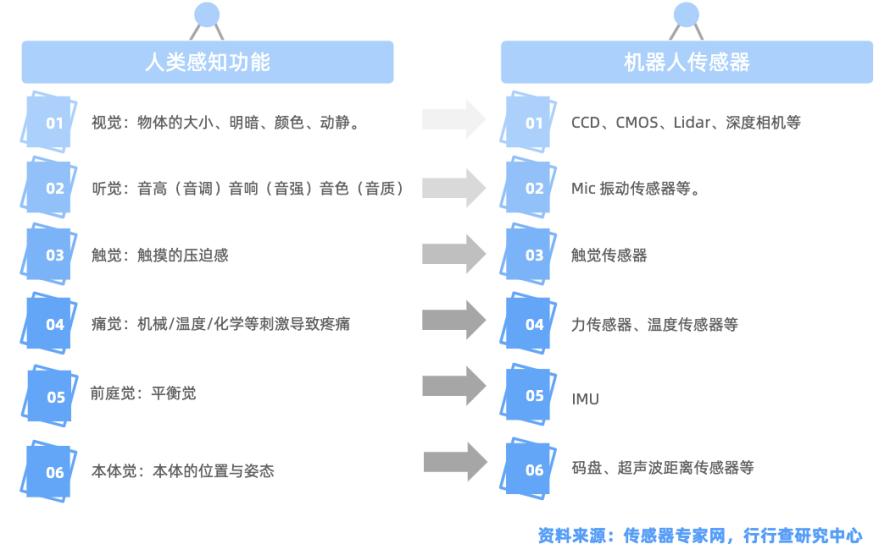
目前在人形机器人的应用中,力觉传感器、触觉传感器/柔性电子皮肤、视觉传感器、高性能惯性测量单元IMU等具有较高的价值和市场潜力。
整体来看,视觉传感器格局较好,力觉价值量最大,触觉天花板较高。
01 力传感器
人形机器人产业技术路线不断演进,手和脚等末端执行机构对精度和灵敏度要求提高,进一步提升力传感器的需求。
力传感器是人形机器人的力控核心。
通过力反馈,人形机器人可以实时感知与环境之间的接触力,并调整动作以适应。通过力控制,机器人运用这些力信息主动调整及做出动作。
力传感器主要为力矩传感器,可以在各种旋转或非旋转机械部件上对扭转力矩感知进行检测,将扭力的物理变化转为精确点信号的一种传感器。
按照测量维度划分:一维、三维、六维力/力矩传感器的最常见。
测量维度的数量越多,产品生产难度越大。
根据坤维科技CTO袁明论介绍:“如果力的方向是固定的,可以采用一维力传感器;如果力作用点与传感器标定参考点重合,但力的方向随机变化,可以用三维力传感器;而如果力的方向和作用点都在三维空间里随机变化,就应该选用六维力传感器进行测量。”
一维力传感器:适用于力的方向和作用点固定的场景,标定坐标轴为OZ轴。一维力传感器可以配合谐波减速器在精准力控的改善。
三维力传感器:适用于力的方向随机变化,但作用点不变且与标定参考点重合的场景,可同时测量Fx、Fy、Fz三个分力。
六维力传感器:是维度最高的力觉传感器,能够提供最高维度的力觉信息,并给出最为全面和精准的力觉数据。适用于力的方向和作用点都在三维空间内随机变化的场景,能同时测量沿三个坐标轴方向的力和绕三个坐标轴方向。
在人形机器人的末端安装六维力传感器,可以获取力传感器往后段的力觉信息。
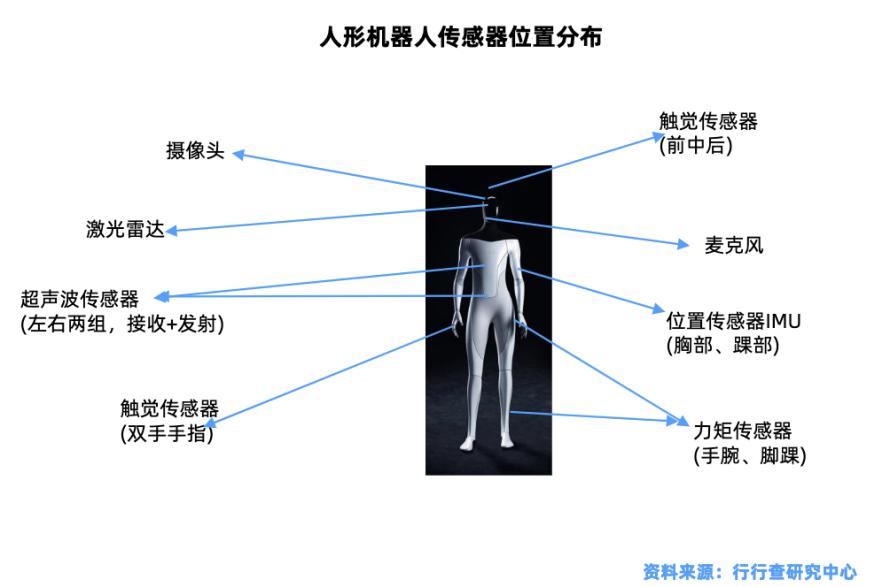
优必选为人形机器人均在手腕和脚踝处配置了4个六维力/力矩传感器。
特斯拉人形机器人手腕和脚腕关节使用六维力传感器。

资料来源:特斯拉
六维三大核心壁垒:六维力传感器传感器技术和使用难度都比较大,三大核心壁垒包括:结构设计、标定与检测和算法设计。
六维力传感器需要同时测算六个方向的力,这一过程中会遇到六个方向力之间的串扰问题。为了确保传感器的精确测量,校准系统重要性突显,包括标定设备和数据库的支持。而算法解耦作为实现精确测量的关键步骤,必须依赖标定设备来完成。标定设备与算法数据库的结合,共同构成了六维力传感器技术赛道中的一道重要壁垒。
弹性体加工壁垒难度在于需要五轴机床进行加工,由于薄膜结构易变形,还需真空吸附工装。
此外,应变片的贴装也是关键难点之一,自动切片机是主要生产设备,目前主要生产商在日本。解决应变片贴装的自动化问题也是行业壁垒之一。
竞争格局:六维力矩传感器市场中,主要以美国ATI、德国ME等海外厂商基本上主导全球市场。国内厂商格局较为分散且国产替代加速。
国内厂商中目前可批量化供应的企业较少,宇立仪器、蓝点触控、坤维信息、鑫精诚、海伯森等具备较强竞争力,部分指标对标海外产品,柯力传感、昊志机电、东华测试、安培龙、神源生智能、瑞尔特测控、东华测试、凯尔达、凌云股份、均胜电子、八方股份等公司近年来加速布局。例如,柯力传感已完成人形机器人手腕、脚腕,以及工业臂、协作臂末端的产品系列开发,掌握了结构解耦、算法解耦、高速采样通讯等关键技术;东华测试的六维力传感器基于金属薄膜应变片设计,内置低噪声放大器和采集卡,经过矩阵解耦提升精准度,可做到串扰<2%FS,非线性<0.5%FS,迟滞<0.5%FS,可应用于机器人、科学研究和自动化检测等领域。
整体来看,目前六维力传感器市场基数偏小,尚未形成明显规模效应。
02触觉传感器
触觉传感器是机器人直接感知环境作用的重要传感器,应用于机器人的关节和柔性皮肤等领域。
触觉传感器可以使机器人通过触摸来感知物体的形状和质地等物理特性,从而进行精确的抓取操作。
特斯拉人形机器人手部传感器中价值量最大的是触觉传感器,Optimus的每只手指均配备柔性触觉传感器。
标准配置下,灵巧手在五根手指的指尖和指节布置约14个触觉传感器,部分掌心也有应用但量少。工业级触觉传感器需达100-300万次测量寿命,满足灵巧手30万次抓握需求。

触觉传感器主要分为柔性和刚性(MEMS为主)。
其中,柔性触觉传感器具有更高的价值,壁垒主要在材料和制造两方面。
材料及降本壁垒:材料选择包括敏感材料有机聚合物、石墨烯以及柔性基底材料,制备工艺复杂,导致成本居高不下,增加了大规模生产的成本压力。
技术壁垒:电子皮肤难以兼顾高柔性和高弹性,且实现多种功能需要多种传感器的融合,会影响到电子皮肤的轻薄性;此外电子皮肤传感器需要接入采集电路,复杂接线会一定程度影响活动。
市场格局:全球柔性触觉传感器市场主要被海外企业占据,主要厂商包括Novasentis、Tekscan、JDI、Baumer、Fraba。
国内布局触觉传感器的厂商有苏州能斯达电子(汉威科技)、福莱新材、申昊科技、弘信电子、墨现科技、力感科技、瑞浒科技等、埔慧科技、帕西尼感知、钛深科技、柔宇科技、宇博智能、苏试试验、中科纳芯、他山科技、奥迪威等。
未来各场景更精细的触觉感知能力需求将推动机器人触觉传感器需求进一步增加,如人形机器人的肢体、胸腔等部位有望成为潜在应用场景。
机器人触觉与电子皮肤:
资料来源:福莱新材
03视觉传感器
视觉传感器是机器人观察的基础。
其底层逻辑在于为机器植入“人眼与大脑”,使机器可代替人工来对被检测物品做测量与判断。
通过相机硬件和计算机算法,让机器人处理来自现实世界的视觉数据。
人形机器人视觉方案目前主要以结构光、双目或多目RGB、TOF等的组合方案为主;算法基础强的厂商会采用更为简单的传感器方案,而算法相对薄弱的厂商会选择更为核心的硬件。国内大多厂商使用多传感器融合方案实现环境感知。
深度摄像头(如激光雷达、ToF摄像头)可以帮助获取3D空间信息,使人形机器人能够识别周围环境中的物体行人和障碍物等,实现避障和导航等功能。
例如,奥比中光最新研发的dToF(直接飞行时间)激光雷达传感器芯片LS635,集成了高性能SPAD像素以及高性能数据处理模块的激光雷达传感器芯片,采用行业最先进的3D堆叠工艺的背照式SPAD-SoC芯片,已应用于机器人、无人机和自动驾驶等场景。
激光雷达用于环境的高精度测距,帮助机器人了解周围障碍物的位置和动态,为路径规划和避障提供重要信息。
禾赛科技推出了面向机器人领域的迷你3D激光雷达JT系列产品,采用禾赛第四代自研芯片,拥有全球最广的360°x187°超半球视野,为机器人提供零盲区的三维感知能力。
速腾聚创推出了全球首款机器人全固态数字化激光雷达E1R,搭载数字化SPAD-SoC芯片和2DVCSEL芯片,可以支持各类型移动机器人在不同光照条件场景中穿梭作业。
当前机器视觉向机器人视觉不断进化,全球机器视觉市场以美国康耐视和日本基恩士为代表的厂商占据全球超50%的市场份额。
国内机器视觉行业以海康威视、大恒科技、天准科技、凌云光为代表的中国本土机器视觉厂商已在核心零部件技术与独立软件算法等方面进行大力投入;奥比中光在中国服务机器人3D视觉传感器领域市占率领先;奥普特拥有完整的机器视觉核心软硬件产品。
04 听觉传感器
机器人听力系统最基本的两方面:一是自动语音识别,二是声源定位(本质是从所获得的信号中提取目标的位置信息)。
对于声源定位,传感器阵列主要是麦克风阵列,常采用多个麦克风分布在三维空间,对空间中信号的不同方向和方位的立体感知能力有所提升。麦克风数量一般超过2个,消费级麦克风阵列一般不超过8个。
当前MEMS麦克风正逐步成为主流的技术方案。国内以敏芯股份、和林微纳、歌尔股份等为代表的厂商在MEMS麦克风领域重点布局。
05IMU惯性传感器
惯性传感器是机器人运控及导航的基础。
按被测物理量划分,可分为加速度传感器(加速计)和角速度传感器(陀螺仪)。
将加速度计与陀螺仪整合,可以得到惯性测量单元(IMU)。
IMU用于测量物体三轴的角速度与加速度,一般包含三个单轴加速度计和三个单轴陀螺仪,部分还配有磁力计。
IMU能够实时测量人形机器人在三维空间中的角速度和加速度,通过感知机器人身体的倾斜、旋转等姿态变化,为控制系统提供实时反馈,使其能够快速调整机器人的步态和姿态,以保持平衡防止摔倒。
人形机器人运动传感器主要是惯性传感器IMU,而位移姿态检测和稳定性控制主要依赖于MEMSIMU。公开资料显示,国内厂商中芯动联科深耕MEMS陀螺仪,敏芯股通过控股子公司中宏微宇IMU算法积累,投资敏易链半导体的陀螺Asic设计以及自研加速度传感器的技术沉淀,逐步布局从MEMS加速度传感器、MEMS陀螺以及MEMSIMU的产业链条;华依科技IMU在智驾与人形机器人领域也有较快进展。
随着特斯拉人形机器人量产在即,以及以宇树和智元等为代表的国产人形机器人产业进程提速,后续有望进一步带动产业链各环节零部件厂商市场份额提升。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




