让人形机器人保持平衡的核心IMU
来源:Xsens
发布时间:2025-11-27
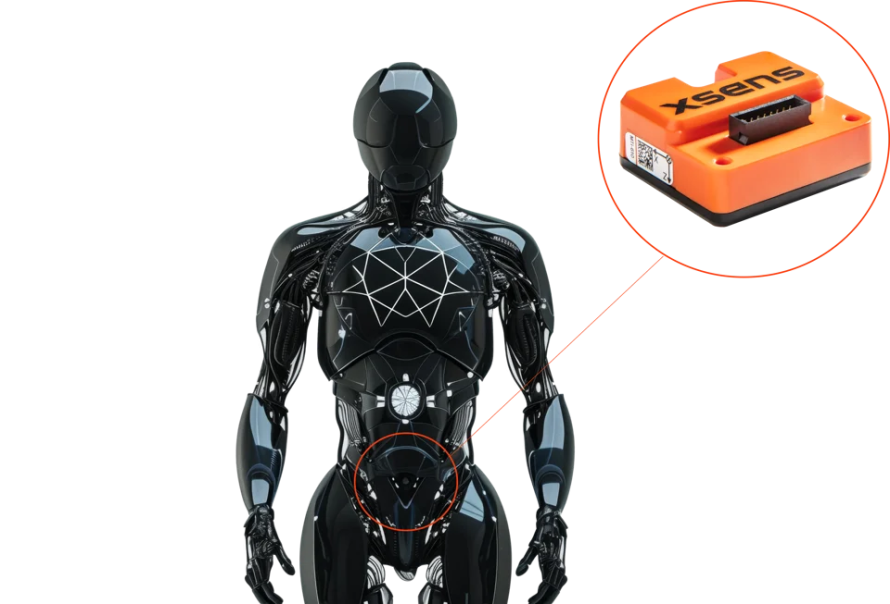
让人形机器拥有和人类一样的的平衡能力:Xsens惯性传感器如同人形机器人的“内耳”,提供高达400Hz的姿态数据,实现稳定行走、敏捷移动及实时防跌倒功能。
帮助人形机器人拥有人类的行走、奔跑与复原能力
人形机器人正走出实验室步入现实世界。要像人类一样行走、奔跑并恢复平衡,它们需要的不仅是预设动作,更需要可靠的平衡控制系统。
Xsens工业级惯性测量单元(IMU)提供动态平衡控制、步态稳定性和防跌倒所需的高频姿态与状态估算。该技术已应用于全球数百台人形机器人,助力机器人在不可预测的环境中保持直立姿态。

人形机器人如何保持平衡
工程师采用的控制方法包括:
1
零力矩点(ZMP):通过将机器人的压力中心保持在支撑多边形内确保行走稳定。Xsens惯性测量单元(IMU)协助计算ZMP,该点必须始终位于支撑多边形内以防止机器人倾倒。
2
压力中心(CoP)估算:实时监测稳定性的关键技术。
3
Push-recovery策略:使机器人能够检测并应对干扰。
4
姿态控制与运动控制:通过精细调整步态和上肢动作,实现自然的类人行为。
Xsens惯性测量单元(IMU)为以上这些控制方法提供姿态估计和低漂移惯性数据,使其成为人形机器人平衡控制的关键组件。
为何选择Xsens用于人形机器人?
1
如人类般平衡:Xsens惯性测量单元(IMU)充当机器人的内耳,实现自然、类人般的稳定性。支持基于零力矩点(ZMP)和压力中心(CoP)的平衡策略。
2
高动态精度:最高400Hz的姿态输出,实现快速精准的控制回路与敏捷恢复。支持状态预估与push-recovery。
3
紧凑高效:功耗低的OEM和SMD模块(最小尺寸仅12×12毫米)。
4
开发者即用:ROS 1/2驱动程序,支持Nvidia Jetson,跨平台兼容性和即插即用API,加速集成进程。

应对挑战:让人形机器人保持平衡
1
机器人在动态环境下容易失去平衡
Xsens传感器解决方案提供高采样率惯性反馈(高达400Hz),实现即时姿态调整。
2
商用IMU漂移过大
所有Xsens传感器均为工业级产品,并配备先进传感器融合技术,确保姿态测量稳健且抗漂移。
3
集成耗时过长
我们提供即用型ROS 1/2驱动程序、Nvidia Jetson兼容方案及开源SDK,显著加快开发进程。
4
空间与功耗受限
Xsens紧凑型模块采用OEM/SMD封装形式,低功耗特性完美契合人形机器人设计限制。

Xsens:您在人形机器人领域的好搭档
Xsens不仅能协助人形机器人实现平衡控制,更能训练机器人像人类般行走。
Xsens是目前唯一的既能教会人形机器人模仿人类动作,又能为其配备惯性“内耳”系统以保持平衡的制造商。从构想到落地,满足您研发团队的一切需求。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




