昆泰芯微电子新一代机器人关节磁编码器解决方案系列二
来源:昆泰芯
发布时间:2025-07-15
技术背景与行业趋势
在智能机器人快速演进的今天,尤其是人形机器人、机器狗等领域,对关节位置控制提出了前所未有的高精度、高动态响应、低延时、小体积要求。
基于深厚的磁阻传感技术积累,昆泰芯微电子(Conntek Microelectronics)提出了新一代磁性绝对角度编码器系列,包含KTM5900、KTM5910、KTH57、KTH78等核心产品。这些产品以极致精度、超小封装、灵活应用组合,支撑智能关节对高速、宽温、高稳定角度反馈的苛刻要求,为机器人行业带来了全新的解决方案。
本文主要介绍:
● KTM5900(离轴绝对编码器)搭配两颗KTH5701(高速高精度霍尔角度传感器)结合游标磁铁实现中控绝对值角度输出,校准后精度可达到±0.015°。
● KTM5900(离轴绝对编码器)搭配KTH78(高精度3D霍尔角度编码器)结合单对极加多对极磁环,校准后精度可达到±0.01°
下文将结合各项实际测试数据和实验验证,系统性展开每一款产品在不同场景下的性能表现与技术细节分析。
单对极+多对极游标磁环组合(KTM5900+KTH5701)
为了在极小空间内进一步提高绝对角度测量分辨率,昆泰芯提出了单对极与多对极磁场叠加的“游标式”组合结构。
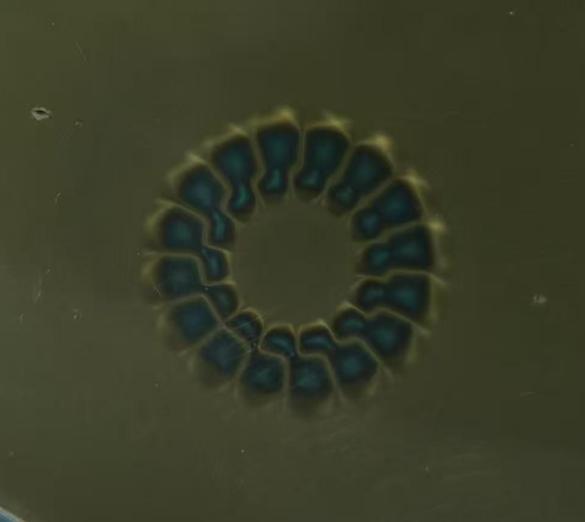
测试采用外圈8极对充磁、内圈7极对充磁的小型磁环。
● 外圈磁场由KTM5900系列芯片读取,提供高频细分角度参考;
● 内圈磁场由两颗KTH5701芯片联合读取,形成绝对角度基准。
其中,下面演示视频中所用的磁铁尺寸外径为24mm,内径为14mm的游标磁环,实测如下图:
根据游标原理(Vernier Principle),通过检测两组磁场相位差,可在数学上将角度细分到原始多对极分辨率之外,显著提高绝对位置分辨率。
实测数据显示,在完成系统校准后,该结构实现了绝对角度误差控制在±0.015°以内,
技术优势总结:
● 极小空间实现超高分辨率;
● 出色的抗偏心能力;
● 不依赖复杂机械结构,易于标准化量产。
KTH7812+KTM5900实时绝对位置输出验证
为了解决高速动态环境下绝对位置实时读取的技术瓶颈,昆泰芯提出了KTH7812传感器与KTM5900解算芯片的组合应用方案,系统测角精度达到±0.01°以内的效果。
系统架构说明:
● KTH78负责单对极磁铁高灵敏度、低噪声的磁信号感知,作用用于分辨上电时KTM5900外圈多对极磁铁所在的极对;
● KTM59负责绝对角度融合,非线性校准实现高精度角度输出。
测试环境搭建中,通过旋转平台模拟机器人关节动作,转速设定至100RPM, 通过光编与磁编角度相减得出绝对角度精度。实测结果标明这一组合可以实现中空绝对值编码器角度输出,且精度可以达到±0.01°。
总结与未来展望
昆泰芯微电子基于TMR磁阻技术与3D霍尔角度技术平台, 通过KTM5900、KTM5910、KTH5701、KTH7812等多款核心产品, 完整覆盖了从在轴、离轴到游标式组合、高速闭环控制等多种机器人关节应用场景。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




