北京大学在触觉传感器方面取得进展,实现机器人指尖超分辨率力感知
来源:MEMS
发布时间:2025-09-15
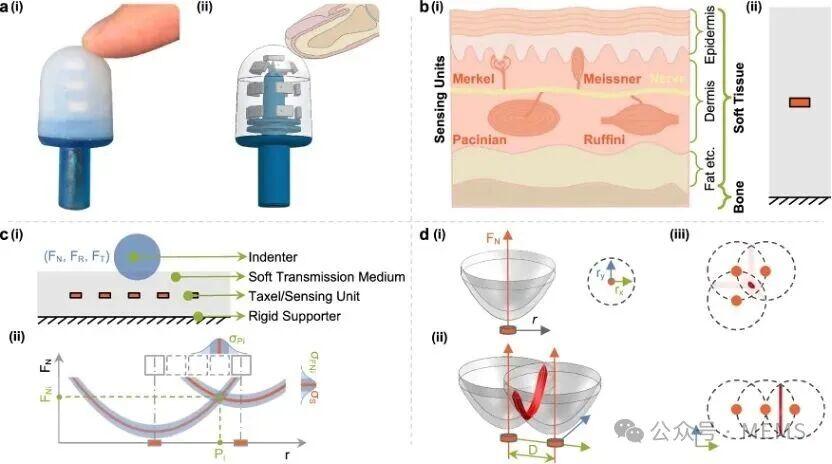
人类通过触觉与环境交互的能力令人惊叹,我们的指尖就是一个典型例子。指尖皮肤包含多种类型的机械感受器,协同工作为人类提供丰富的触觉信息。其中一些感受器检测接触物体、软组织和骨骼相互作用产生的应力,并根据其形态和真皮层深度表现出差异。通过理解这些机制,研究人员可以开发模拟人类触觉的新技术,例如用于机器人的仿生触觉指尖。
本文理论概览
机器人可以从触觉感知中受益,增强交互能力。交互涉及触觉传感器、接触物体以及两者之间复杂的方向力运动(法向力和剪切力)。北京大学触觉传感实验室与德国图宾根智能系统研究所的研究人员提出了一种将它们统一起来的综合理论,以推进触觉传感器设计,解释剪切力引起的性能下降,并展示了机器人应用场景。相关研究成果已经以“Sensing multi-directional forces at superresolution using taxel value isoline theory”为题发表于近期的Nature Communications期刊。
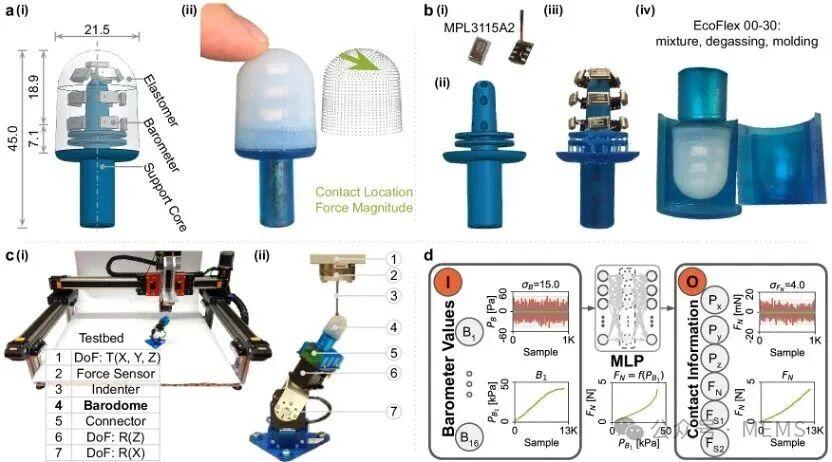
在这项研究中,研究人员提出了一种基于触觉传感单元数值等值线(TVI)的理论,为构建通用触觉传感器提供了一种明智的方法。该方法为软弹性体中的触觉传感器单元放置,以及针对超分辨率所需要的触觉传感单元布局提供了指导,它还揭示了剪切接触力引入的复杂行为。在实践方面,研究人员根据理论推导的指导,开发了一种名为“Barodome”的触觉指尖传感器,其传感表面形成三维圆柱体和抛物面形尖端。整体而言,该方法可以改进传感器设计、制造、数据收集和校准,形成一种通用的标准工作流程。
目前最先进超分辨率触觉传感器与Barodome触觉传感器的比较
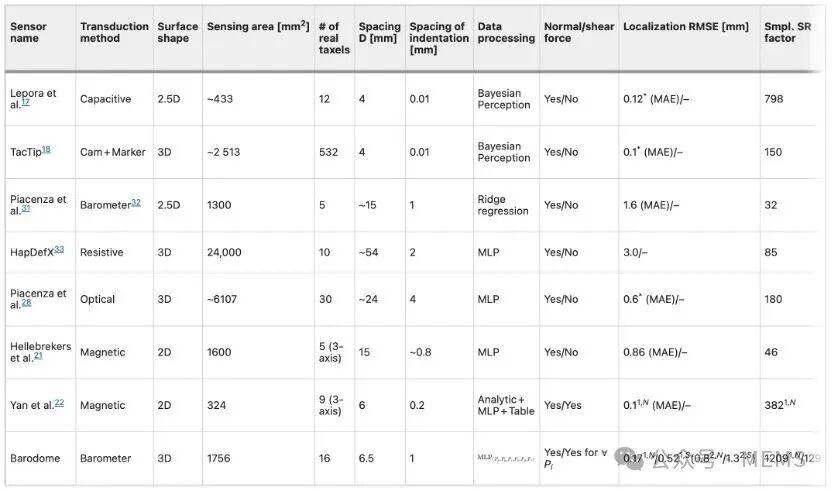
在触觉传感器设计中,主要关注点是尽可能使用最少的物理传感单元来获得高传感性能。该理论强调了传感单元的感知范围、对力的敏感性以及传感器噪声在实现这一目标中的重要性,并通过TVI理论来阐述它们之间的依赖关系。通过调整结构特性,例如软传输介质的厚度和传感器在其内部的放置位置,研究人员可以相应地定制传感器的感知范围和对力的敏感性。软传输介质的关键特性包括杨氏模量和泊松比。较低的杨氏模量,在相似的TVI理论条件下,可以提高敏感性,但会增加惯性及强力作用下的变形。较低的泊松比(弹性体为0.5,金属为0.3)会改变TVI,降低径向敏感性,同时提高深度敏感性。
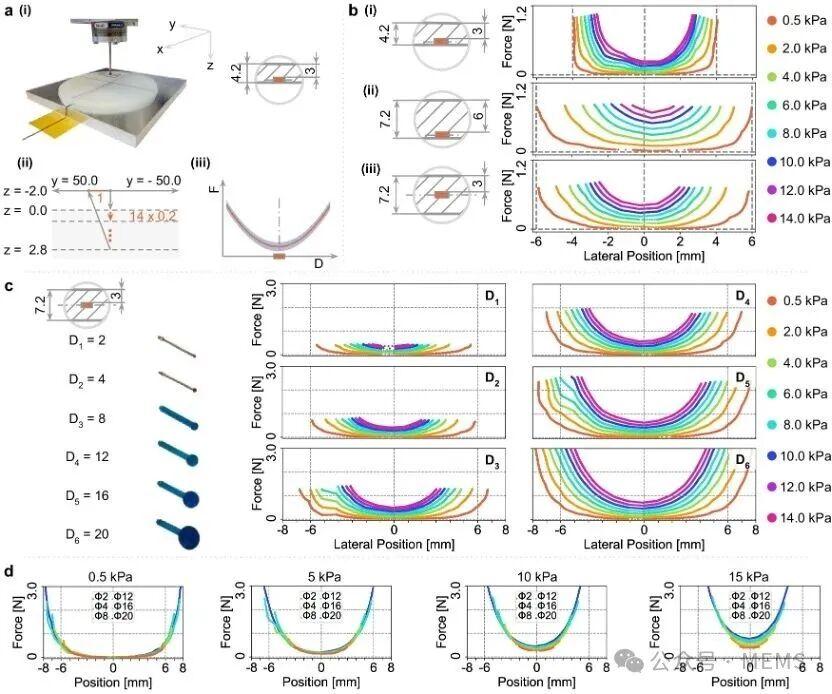
结构因素与压头尺寸对触觉传感单元性能的影响
对单个触觉传感器单元的分析能够精确调整理论模型中的超参数,确保对完全集成式传感装置(例如3D指尖形触觉传感器Barodome)的最佳性能进行准确预测。通过将期望性能目标与预测结果进行比较,研究人员可以在实际构建整个传感器之前,有效优化结构和材料,以实现目标。
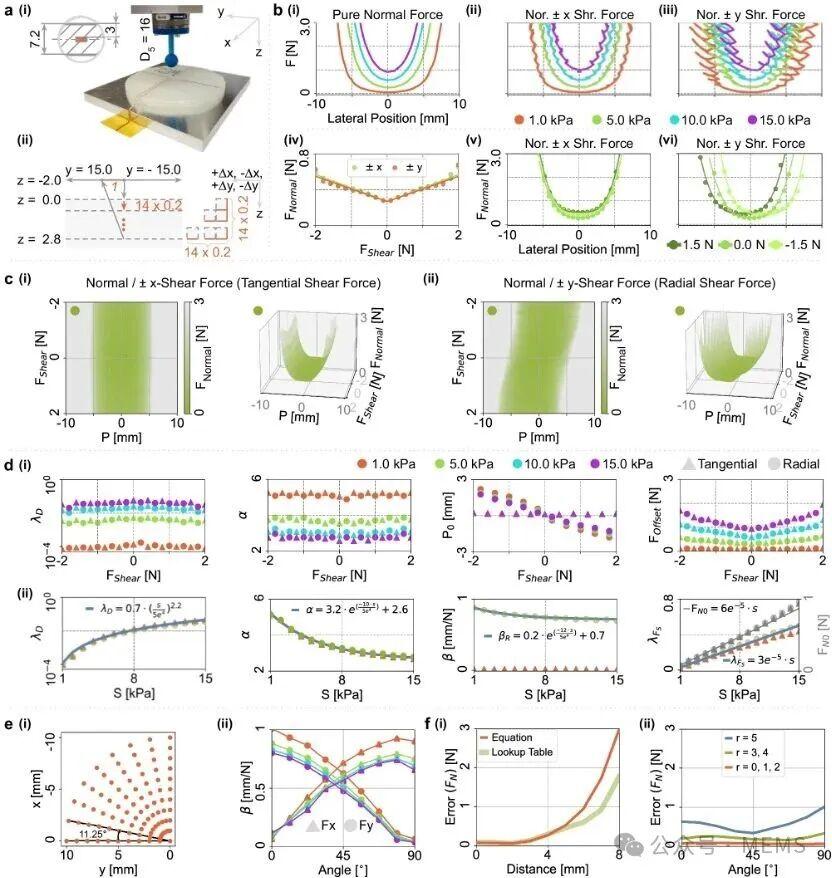
力方向对TVI的影响
这项研究成果的一个关键贡献在于揭示了剪切力在触觉传感性能中的重要作用,这对开发能够检测并解耦剪切力与法向力的触觉传感器提出了挑战。接触位置、法向力和剪切力的多种组合,可能会产生相同的传感器读数。研究人员并没有依赖复杂的传感器结构来实现特定方向的传感,而是探索了类似人类皮肤中发现的触觉传感机制。观察表明,额外的剪切力会改变由纯法向力形成的平滑TVI形状。不同的TVI形状对应于剪切力的方向。切向剪切力会降低压力,从而降低传感器值,需要更高的法向力来补偿。扭转剪切力与切向剪切力类似,会产生拉离效应,降低传感器读数,并需要更高的法向力。需要注意的是,扭转剪切力需要偏移接触距离才能有效影响传感器单元。径向剪切力可能会拉动或推动弹性体,需要调整法向力。这种效应在倾斜角度(旋转对称)位置依赖性中得到了验证。
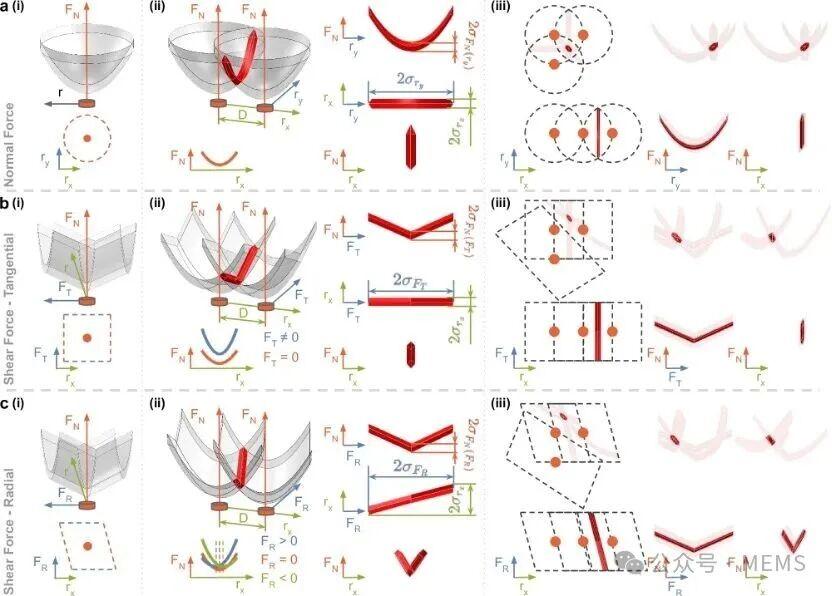
TVI理论建模,用于描述法向力、剪切力方向和接触位置之间的关系
基于这些发现,研究人员开发了一种适合机器人应用的触觉指尖传感器,该传感器包含16个气压单元,集成在三维圆柱体中,并具备抛物面形尖端。利用该传感器,研究人员验证了所提出的理论模型。在法向力情况下,仅含16个气压单元的传感器在定位精度上达到了0.8 mm,在力的量化精度上达到了8%,覆盖了0~4 N的力范围。当考量剪切力时,研究人员观察到系统性能有所下降,定位精度为0.5 mm,力的量化精度为7%,这与研究人员理论模型预测的0.33 mm精度损失相吻合。这一验证进一步强化了所开发理论框架在实际应用中的可靠性和准确性。
触觉传感器设计流程
这项研究成果为设计能够从各个方向精确感知剪切力的高性能触觉传感器提供了全面指南。理论建模不仅加深了研究人员对人类皮肤工作机制的理解,还将触觉感知的各个方面关联起来,为工程师设计性能更优的传感器提供了宝贵见解。此外,研究人员想强调的是,当前理论是专门为具有超分辨率能力的单点接触推断而开发的。涉及连续或分布式接触模式的情况(例如遇到复杂表面轮廓时),便超出了当前模型的假设。处理此类情况可能需要完全不同的方法,例如基于视觉的触觉传感器,或基于密集阵列的触觉系统等。
展望未来,进一步研究方向包括理解四种不同机械感受器的不同形态的影响,并探索如何通过单个神经传导通道有效地合并它们的信号,并在另一端有效地解耦。此外,另一个有前景的研究方向是,如何有效地利用这些传感器所提供的密集触觉传感信息。将触觉反馈集成到机器人的决策过程中,对于增强它们在现实场景中的自主性、适应性和交互能力具有巨大潜力。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




