触觉传感:基于光学的多点三轴柔性压力传感器
来源:新一代柔性传感
发布时间:2025-03-06
三轴触觉压力传感器能够在单个点上检测法向和切向压力,提供全面且精确的机械信息,性能媲美甚至超越人类触觉。通过传感器阵列识别多点压力分布,结合人工智能和数据分析,研究人员已展示了更智能感知功能的可行性。传感器的薄型和轻量化设计对系统级集成和柔性至关重要,推动了机器人技术、医疗和人机交互等领域的突破。然而,具有薄膜形式和柔性的光学多点三轴压力传感器尚未实现,主要受限于刚性透镜聚焦系统和成像电路的要求,以及压力下标记位置变化较小导致的三轴压力检测精度不足。
鉴于此,东京大学Takao Someya课题组,在" Science Advances"期刊上发表了题为“ An optical-based multipoint 3-axis pressure sensor with a flexible thin-film form”的最新论文。作者提出了一种柔性压力传感器,通过光学方法检测多点三轴压力。该传感器包含一个6 × 8的传感单元阵列,用于检测总面积为3 cm × 4 cm的多点法向和切向压力分布。薄膜传感器的整体厚度仅为1.5 mm,所有组件均为柔性,因此可以弯曲至18 mm的半径。该传感器在长时间操作和重复测试中表现出一致的响应和优异的耐久性,同时提供高达360 kPa的法向压力响应和高达100 kPa的切向压力响应,且检测误差极低。作者的传感器具有较大的感测范围,能够在大多数触觉应用场景中准确提供多点三轴压力信息,同时又薄且柔性,允许其安装在曲面上,而不会严重干扰物体的原始结构和形态。

高分辨率与高灵敏度:传感器通过光学方法实现多点三轴触觉压力传感,能够提供丰富的表面压力分布信息,适用于多种与人类互动相关的机器人应用。
薄膜柔性设计:传感器采用薄膜形式,厚度仅1.5mm,弯曲半径可达18mm,能够在复杂曲面上灵活安装,且不影响物体原始形状。
大范围压力检测:在3cm×4cm区域内实现三轴压力分布检测,法向和切向压力检测范围分别达到360 kPa和100 kPa,具有高精度和广泛的动态范围。
创新光学调制技术:使用多孔橡胶作为三轴压力敏感光调制器,省去了传统光学系统中厚重且刚性的聚焦系统,同时保持了高灵敏度。
集成柔性组件:通过集成超薄柔性背光源和成像器,传感器整体轻薄且柔韧,无需刚性成像芯片,实现了大规模压力传感的灵活性和高精度。
简化安装与集成:传感器无需高集成度或重新设计目标物体,可直接安装在现有物体上,显著降低了安装和系统集成的难度。
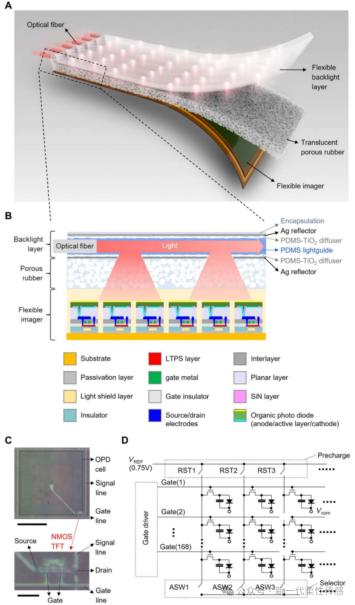
图1. 基于光学的多点三轴压力传感器结构。(A) 传感器构造示意图。(B) 传感器结构的横截面视图。(C) 柔性成像器的像素照片。比例尺,100 μm(上)和20 μm(下)。(D) 柔性成像器的电路图。VREF、VCOM、RST 和 ASW 分别代表参考电压、公共电压、复位开关和模拟开关。
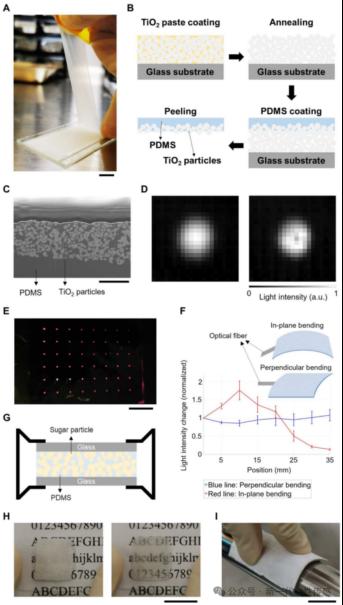
图2. 背光层和多孔橡胶的制作和性能。(A) PDMS-TiO2复合光散射器的照片。比例尺,1 cm。(B) 散射膜的制作工艺。(C) 散射膜的横截面扫描电子显微镜图像,显示TiO2颗粒嵌入膜表面厚度为2至3μm的区域。比例尺,2μm。(D) 背光发出的光点,左侧为带散射膜,右侧为不带散射膜。(E) 带有6 × 8发光窗口阵列的背光层的照片。比例尺,1 cm。(F) 背光层在弯曲后与平坦状态下不同位置的发光强度变化。插图显示了弯曲方向的示意图。平面弯曲和垂直弯曲分别表示沿光纤光注入方向和垂直于该方向的弯曲。(G) 多孔橡胶制作过程的示意图。(H) 半透明多孔橡胶的光学特性。左:原始状态下的橡胶显示出强烈的光散射。右:橡胶被玻璃板压缩,间隙增大。比例尺,1 cm。(I) 安装在扶手上的柔性传感器照片,用于检测三轴压力分布。比例尺,2 cm。
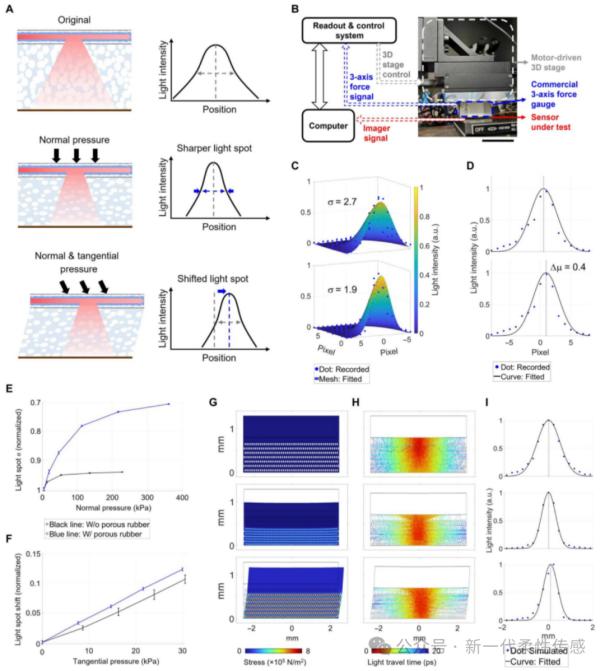
图3. 三轴压力传感器的机制和响应。(A) 传感单元的三轴压力传感机理。传感单元内的光分布示意图(左)以及底部成像器记录的光斑轮廓(右),分别在原始状态(顶部)、正常压力下(中部)以及同时施加正常和切向压力下(底部)。光斑轮廓上的虚线和箭头用于说明形状和位置的变化。(B) 自制的三轴压力加载和测量装置。比例尺,5cm。(C) 光斑拟合以检测正常压力。顶部:无正常压力时的拟合结果。底部:施加360 kPa正常压力时的拟合结果。(D) 光斑拟合以检测切向压力。为便于观察,展示了拟合的1D轮廓。顶部:无切向压力时的拟合结果。底部:施加105 kPa切向压力时的拟合结果。(E和F) 有无使用多孔橡胶的传感器在正常(E)和切向(F)压力响应的比较。(G至I) 一个传感单元的压力响应模拟。固体力学模拟显示传感器在不同压力加载下的应力和变形(G):原始状态(顶部)、正常压力加载(中部)以及正常和切向压力加载(底部)。几何光学模拟显示在相应压力加载下传感器内模拟光线和光程时间(H)。底部成像器接收到的光信号来自几何光学模拟,以及在相应压力加载下拟合到1D高斯函数的结果(I)。
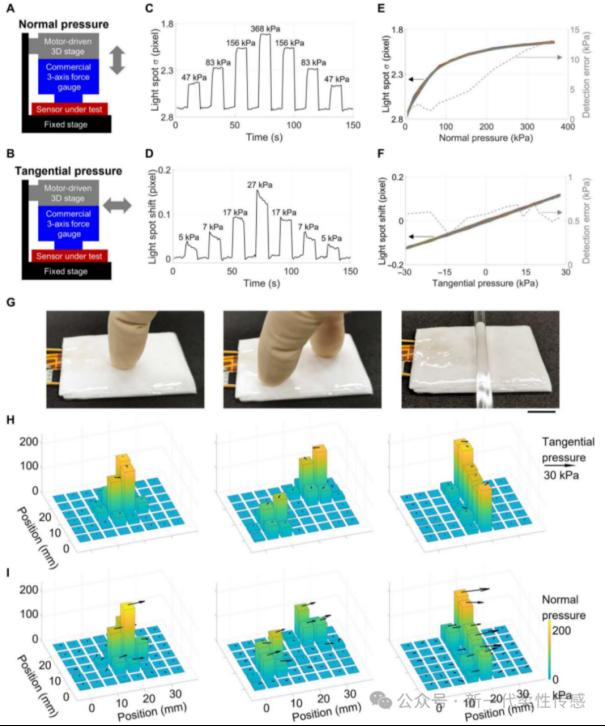
图4. 传感器的特征。(A和B) 通过移动带电机的工作台,使用自制装置施加受控的法向压力(A)和切向压力(B)的示意图。(C和D) 在阶跃变化的法向压力(C)和切向压力(D)下,传感单元的响应。在切向压力实验中,同时施加300 kPa的法向压力以保持可靠的接触。(E和F) 在准静态法向压力(E)和切向压力(F)下,传感单元进行1000次重复测试及计算的压力检测误差。在切向压力实验中,同时施加200 kPa的法向压力以保持可靠的接触。(G到I) 多点三轴压力分布检测。施加三种不同压力模式于传感器的示意图(G):单指触摸(左)、双指触摸(中)以及通过杆施加的压力(右)。比例尺,1 cm。在相应压力模式下主要施加法向压力(H)和同时施加法向与切向压力(I)时检测到的三轴压力分布。
结论与展望
作者开发了一种超薄、柔性的大型压力传感器,能够在3cmx4cm区域内检测3轴压力分布,具有6×8个检测点。该传感器由塑料薄膜构成,厚度仅1.5mm,弯曲半径为18mm,可轻松附着于各种曲面,适用于复杂物体表面的多点三轴压力传感。其能够在360 kPa和100 kPa范围内准确检测法向和切向压力,具有广泛的动态范围,适用于多种触觉交互场景。通过使用多孔结构的橡胶薄膜调制光散射,作者克服了光学传感器在微小变形下检测的挑战,省去了笨重的照明和聚焦系统,并利用超薄柔性成像器实现了高精度、大规模的压力传感。这一设计使得传感器无需高集成度或重新设计目标物体,能够轻松应用于现有物体上的压力监测。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




