破局具身智能落地困境!安森美核心环节布局解析
来源:onsemi(安森美)
发布时间:2025-09-03
随着人工智能算法的发展,尤其是多模态大模型技术的突破性进展,将显著加速机器人产业的发展。不仅能提升机器人的智能水平,也快速推动了人形机器人通往量产的进程。安森美(onsemi)为具身智能机器人、AMR等提供全面的解决方案,推动机器人实现智能化新突破。安森美系统工程经理Theo Kersjes在接受国际电子商情采访时,也分享了安森美推动这一突破的具体实践。

安森美系统工程经理Theo Kersjes
安森美为机器人应用提供关键的感知和电源产品,比如HyperluxTM系列图像传感器(包含用于机器人视觉系统的高分辨率iToF 深度成像解决方案),以及可实现先进电机控制的创新的MOSFET 技术和智能电子保险丝。

Theo Kersjes认为,2025年标志着从技术验证向具体新兴应用场景过渡的开始。虽然具身智能机器人的大规模量产仍需数年,但这正是机器人技术开始往更高水平和能力发展并大规模朝更多应用场景渗透的开端。
关于机器人的应用挑战,Theo Kersjes进一步解释道:“最初的机器人是固定式、执行重复任务的工业机器,如今已演变为能够在物理世界中移动、具备实时感知能力的智能系统。这些机器人走出受控空间,在物流、医疗保健、农业、零售和安防等领域发挥作用,因此必须能够安全地与人类协同工作。技术挑战之一是在所有条件下确保安全。”
最终,所有机器人应用场景的实现都依赖于人工智能与先进感知和控制技术的融合。安森美提供智能感知和电源方案。通过集成电感式位置传感,实现安全、响应迅速的人机交互。同时,作为提供多种传感器方案的供应商,安森美可以提供机器人所需的高分辨率图像传感器,以及支持机器人底部探测的高性价比超声波传感器。
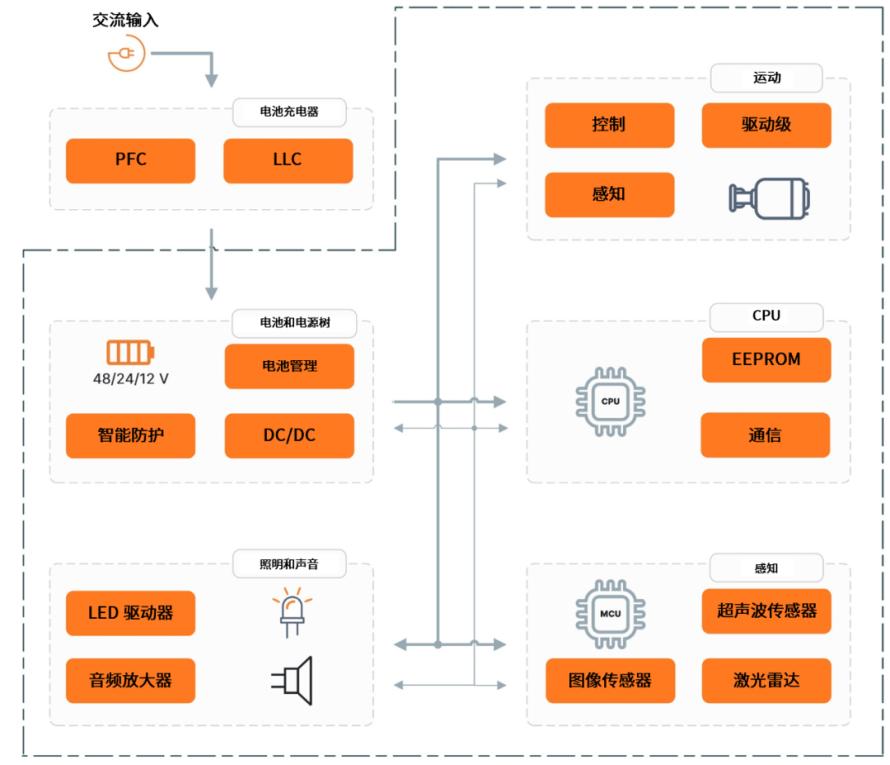
安森美为机器人子系统提供全面且详尽的系统解决方案指南,涵盖以下领域:
传感器(图像传感器、超声波传感器、电感式位置传感器、压力传感器、激光雷达、蓝牙低功耗BLE 5.2 AoA/AoD)
有线通信(CAN、10BASE-T1S)
配电
电池充电
LED信号灯
具身机器人的一个关键挑战是深度感知。今年第1季度,安森美推出的Hyperlux ID系列传感器,采用间接飞行时间技术(Indirect Time-of-Flight),解决了运动伪影问题,能够实现高灵敏度探测,输出精准的感知结果,分辨率高达120万像素,深度达1毫米。
这种深度感知能力正使末端执行器(End-effectors,又称机械臂末端工具/EOAT)得以完成日益精密的操作任务。
另外,采用Hyperlux SG系列100万/200万像素传感器的立体视觉相机同样适用于深度感知场景,是间接飞行时间(iToF)技术的替代方案。
此外,卷帘快门图像传感器家族(包含超低功耗的Hyperlux LP系列与高动态范围的Hyperlux LH系列)还适用于物体检测与避障。
在机器人应用领域,安森美的一个差异化竞争优势是电感式位置传感器技术。其旗舰产品NCS32100作为绝对式旋转编码器,在测量单圈/多圈运动时精度领先业界,可精准捕获位置、方向、转速及转动计数等参数,精度高达±50角秒。相较于光学编码器,电感式编码器具备极强抗干扰能力,不易受振动及灰尘、水渍、油污或金属碎屑等污染物的影响;相比于磁编码器,该方案不仅显著降低元件成本与数量,更完全规避了对稀土金属的依赖。

除尖端产品外,安森美还打造了模块化工艺技术Treo平台——这是业界最先进的模拟和混合信号平台。该平台基于65纳米BCD(双极-CMOS-DMOS)工艺构建,采用模块化架构并集成不断进化、稳健可靠的IP构建单元,可赋能新一代电源管理IC、传感器接口、通信设备及标准产品线的开发。

具身机器人领域的动态平衡(双足行走)、精细操作(抓取微小物体)、续航(目标8小时)被视为短期攻关的重点,实验室技术水平与商用需求之间还存在一些差距。
Theo Kersjes表示:“双足行走机器人存在额外的安全隐患——这类机器人需持续供电以维持平衡。若双足机器人走在楼梯上时突然断电,可能沿楼梯跌落伤人。当前行业正大力制定相关安全标准。”
短期内,双足/四足机器人仅在特殊场景启用,例如需跨楼层巡逻的安防机器人,可在无人时段执行楼梯攀爬任务。而工厂平坦地面的机械臂机器人目前多采用轮式移动,因其效率与安全性更优。结合机械臂(操作端)与移动底盘(平台)的移动操作机器人(Mobile Manipulator Robots)正加速渗透工业工作流。
未来这些机器人将突破预设任务与静态环境的限制,通过情境学习适应非结构化场景,实现跨场景能力迁移,完成从规则驱动向行为智能的范式跃迁。这一进化由基础模型与实时环境反馈共同驱动。
安森美提供以下技术推动具身智能机器人的发展:
Treo模拟混合信号平台:为新一代应用打造高性能模拟/混合信号产品
智能感知传感器:实现移动系统的实时环境感知、精准定位及自适应决策
紧凑型低功耗感知方案:适配轮式机器人至人形平台等全形态硬件
智能电源产品:优化移动平台电池功耗管理与使用效率


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




