无位置传感器无刷直流电机运行分析
来源:西莫电机论坛
发布时间:2024-07-09
直流电动机因其具有良好的调速性能,较宽的调速范围及简单的调速方式被广泛应用在高性能的调速系统中。但是有刷电机的换相器不可避免的存在换相火花、机械噪音、可维护性差等缺点。为了弥补有刷直流电机的这些不足,直流无刷电机(BrushLess DC Motor,简称BLDC)应运而生。直流无刷电机不仅很好的弥补了有刷直流电机的不足,性能上也完全可以和有刷直流电机相媲美,所以越来越多的被应用在高性能伺服及家电等领域。
2 无刷直流电机运行分析
2.1 无刷直流电机结构
下图1为典型的电动车用电机,

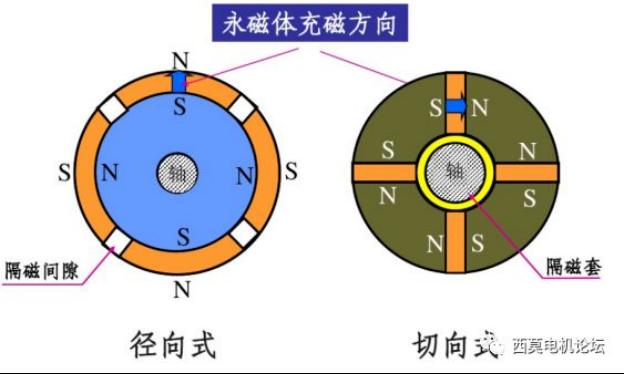
图2给出无刷电机的转子永磁体模型图,
通常情况下,无刷直流电机都有三个固定在定子上的位置传感器(一般为hall)检测转子相对定子的磁极位置,如图4所示反映出通过hall信号检测到的位置信号,图中hall为120°安装方式。
图4 直流无刷电机hall位置信号
2.2 无刷直流电机工作原理
无刷直流电机控制系统不仅仅包括电机本体,还包括驱动电路和逆变器,图5给出电力逆变器电路,电机简化为三个电感器件,采用Y连接;图6给出预驱电路。
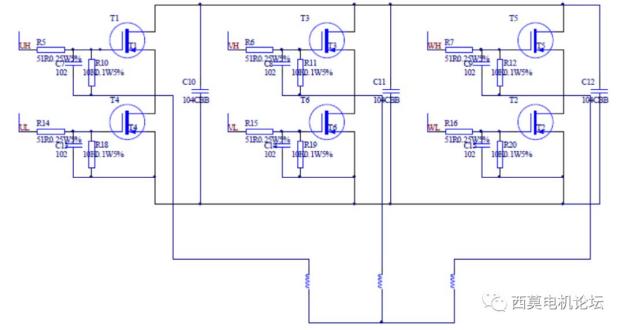
图5 三相全桥逆变器
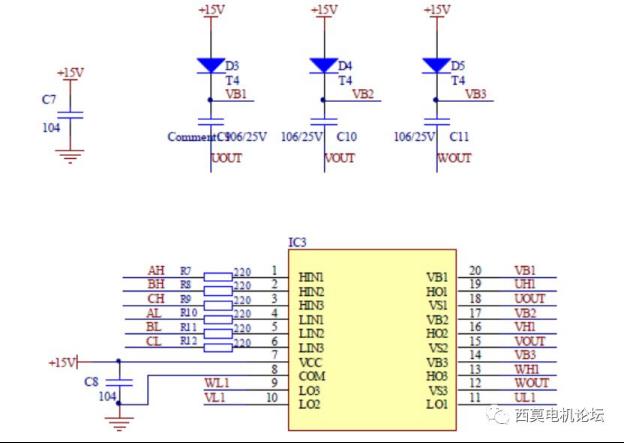
图6 驱动器预驱电路
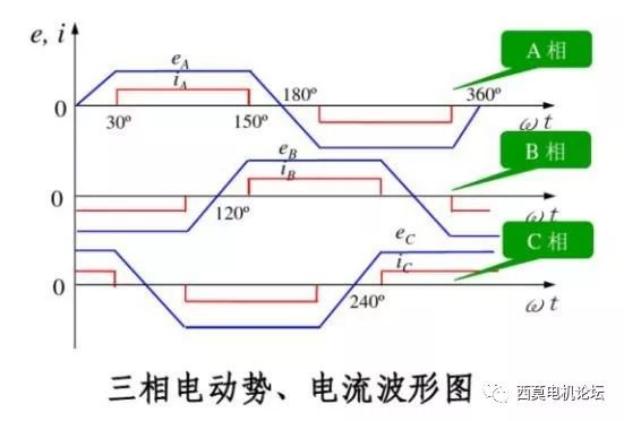
电机运行的时候,三个hall信号通过一些处理之后给到MCU,MCU再根据得到的hall位置信息,按照一定的顺序驱动三相全桥逆变器中开关器件的通断,这样就可以获得六步梯形波的定子电流,使定子绕组产生旋变磁场,定子磁场的平均旋转速度与转子永磁体的转速同步,这样就会有有效的电磁转矩产生,转子连续旋转。从原理上也可以看出,无刷直流电机的运行换相时刻与转子位置息息相关。
下面从转矩角度分析直流无刷电机的运行过程。对于直流有刷电机来说,虽然转子在不停的旋转,但是由于定子侧的电刷位置不变,所以定子产生的直流励磁磁势 和转子侧的电枢磁势处于静止状态,和也自然是相对静止状态。并且由于这两个磁势在空间上互相垂直,确保了直流电动机可以产生最大的电磁转矩,也具有良好的调速性能。而在实际应用中,有的应用为了方便,将直流无刷电机的永磁体移到转子侧,把电枢绕组放到定子侧,定子侧的三相电枢绕组是由三相全桥逆变器供电。定子绕组的供电频率是取决于转子位置信息的,也就是定子的供电频率和转子转速是同步的,因此,定子绕组产生的电枢磁势与转子永磁体产生的励磁磁势相对静止。
无刷直流电机逆变器的导通方式有很多种,以120°的两两导通方式对运行过程进行分析。120°两两导通方式满足下面条件
A 每隔60°换相一次;
B 每个开关器件导通120°;
C 任何瞬间有两只开关器件同时导通。
如上所述,开关管顺序为
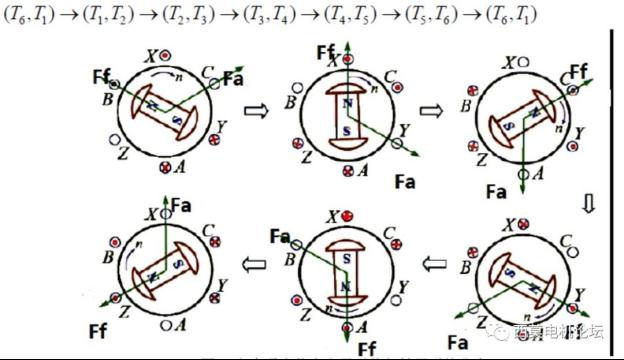
图7 六步通电状态定子磁势与转子磁势分布
2.3 无刷直流电机的无位置启动
由于位置传感器的安装会增加额外的陈本和体积,而且会受到环境温度湿度等影响,所以无位置传感器(SensorLess)的控制方式越来越被大家重视。对于无位置传感器的直流无刷电机控制,大家目前使用的普遍是反电势检测法。但是反电势法有一个很致命的缺陷,就是在电机启动状态和反电势很小的低速状态无法准确得到,也就无法准备得到转子的相对位置,所以无位置传感器直流无刷电机的启动一直都是难点。
目前应用最多的无刷直流电机无位置传感器控制方式是传统的三段式:首先给逆变器一个固定的驱动状态,把定子绕组拉到一个固定的位置,然后利用强制换相的方式进行开环加速运行,当加速到反电势可以准确得到的时刻再切换到利用反电势估算位置的闭环运行阶段。三段式适用于转动惯量小、轻载的运行场合,在重载场合并不适用,长期的开环会导致电机失步,定子电流变大,电机无法正确有效的运行,反电势采样电路如下图8所示。
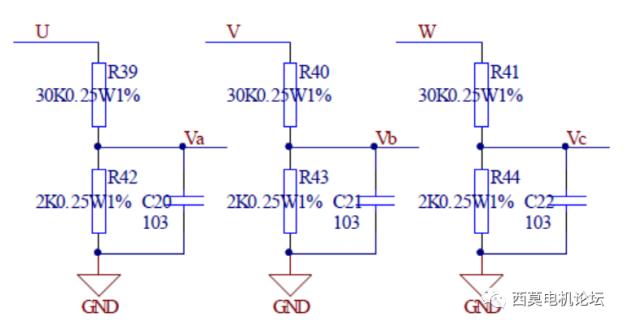
图8 反电势检测电路
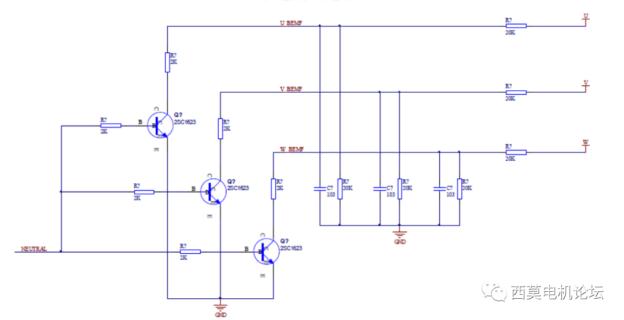
图9 改进版反电势检测电路
传统的反电势采样电路在低速的时刻会存在受到扰动及本身数值很低情况的影响采样不准确,所以可以适当的改进一下,如上图9所示,在低速阶段,使用分压比大的电阻检测反电势,同时对采样得到的ADC进行适当的软件保护,当转速达到一定的时刻在打开三个三极管,使用小的分压电阻检测反电势,这样做可以保证低速运行和跟踪启动阶段有一个良好的动态响应。
针对传统三段式的缺点,还可以进行适当的改进,既电机启动的时刻还是强制拉到一个固定的位置(如果位置没拉到说明给的力不够大,力矩除了和定子转子角度有关之外还和给定的电流有关,所以可以根据负载的不同适当的增加占空比,也不要增加太多,容易过流烧功率器件,所以具体是多少还需要个人根据应用去调节)。之后开环只拉一步,注意是只有一步的开环,因为负载比较大,所以此时检测到的反电势还是可靠的。之后闭环运行即可,波形图如下图10所示。
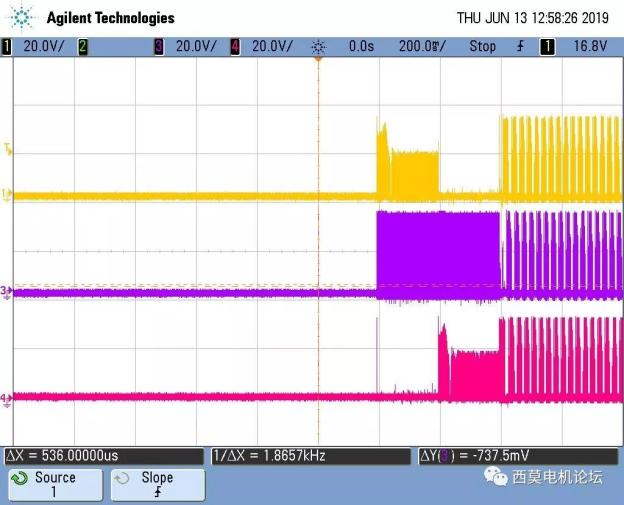
图10 一步开环法运行波形
图10是使用强拉+开环一步运行的波形图,图中的定位时间和开环时间都是200ms,具体应用可以更改这个时间。开环时间不宜过长,也不宜太短,否则可能导致转子磁势跑到定子前面甚至在某个位置震荡,也可能导致还没到理想的夹角区间(60°到120°电角度)。
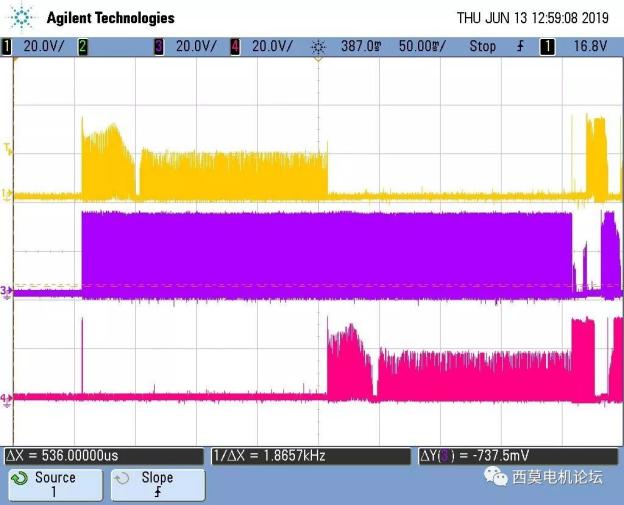
图11 一步开环法运行放大波形
虽然上述方法已经可以解决很多无传感器直流无刷电机的运行问题,但是存在定位阶段会反转的问题,所以目前还流行一种六脉冲定位的静态定位方式。为了克服转子定位出现的问题,提出了基于定子铁芯饱和法来检测转子的初始位置。过对定子绕组施加固定脉宽的检测脉冲,检测电流的变化率或者检测电流的峰值,方法可以提供精确的转子位置信息。
转子位置检测的基本原理是由转子位置引起定子铁芯的饱和效应和定子铁芯非线性磁化的特性。电枢磁势与永磁磁势之间的夹角将会决定电枢反应起去磁作用还是增磁作用,去磁作用与增磁作用将会影响定子铁心的饱和程度,其差异将体现在定子电感上,而定子电感的差异将会导致电流响应的快慢。电枢磁势与永磁磁势的夹角越小,增磁效应越大,相应的定子绕组电感越小。检测出定子电感最小点,便可以判断出转子的初始位置区间。转子相对定子位置与电感L关系如图12所示,
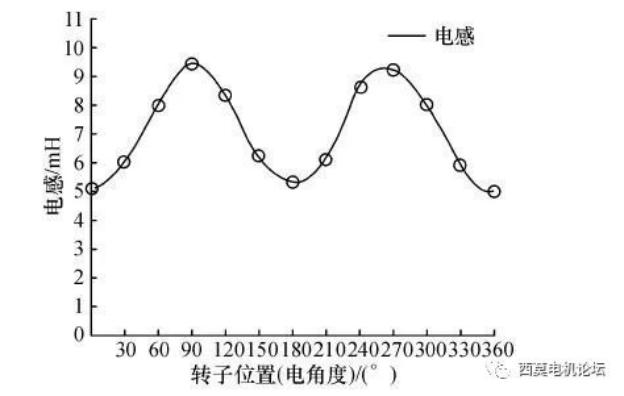
图12 转子相对位置与定子电感关系
工程上,由于电感我们无法直接测量,只能依靠电机的数学模型求出。电机的定子电压平衡关系式为

因为反电势是与转速有关的物理量,当电机静止的时候,转速为0,所以反电势也为0,公式①可以简化为:

那么绕组电流的响应表达式为

式中, 为时间常数,由于电机的电阻是可以近似认为不变的,所以电感就变成了影响电流响应速度的唯一因素,电感越小,电流响应速度越快,在绕组电流变化达到稳定值之前选择合适的时间测取绕组电流,比较绕组电流大小,便可得知电感的大小关系,进而判断电机转子初始位置所在hall位置区间。
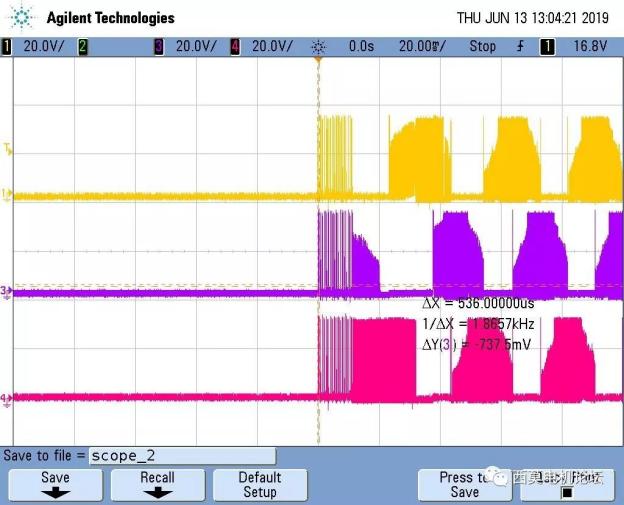
针对上述提出的电感法测量转子位置,采用了两两导通、通入六步脉冲的方式检测母线电流,为了得到的位置信息更准备,采用多次测量位置结果都一致作为最后得到的位置信息,具体结果看图13。
图13为电感法测转子初始位置的电流波形图,为了位置准确,采用了多次定位的方式。
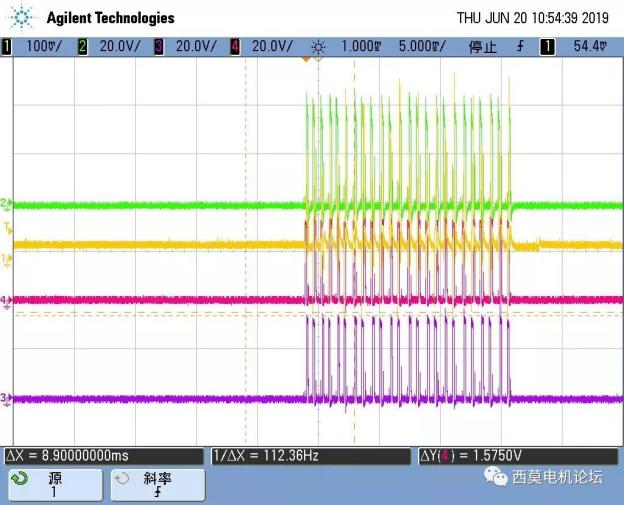
图13 电感法测转子位置波形图-1
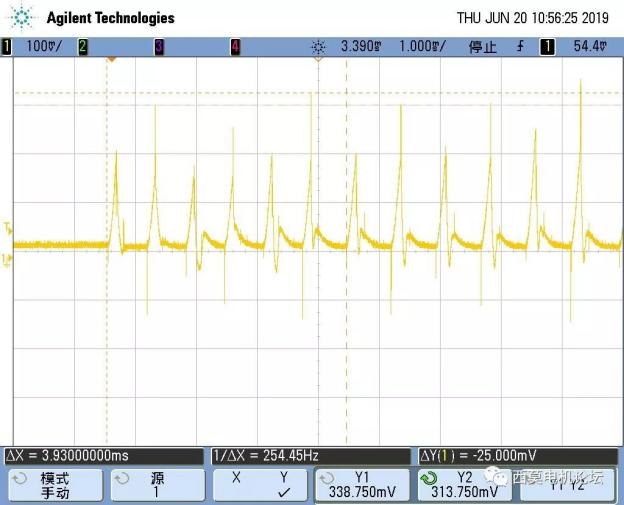
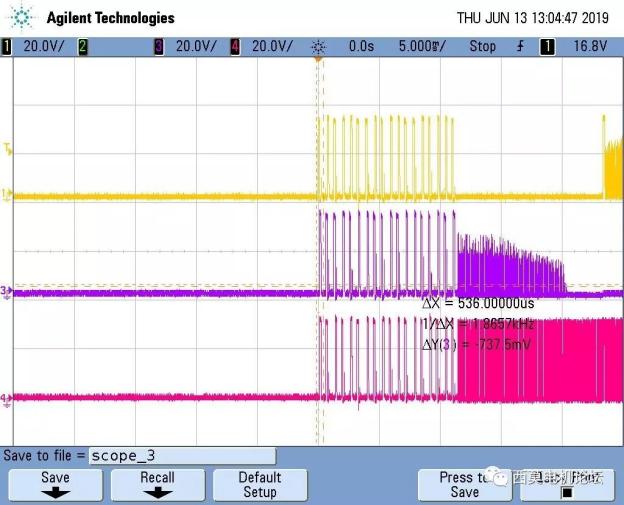
图14 电感法测转子位置波形图-2
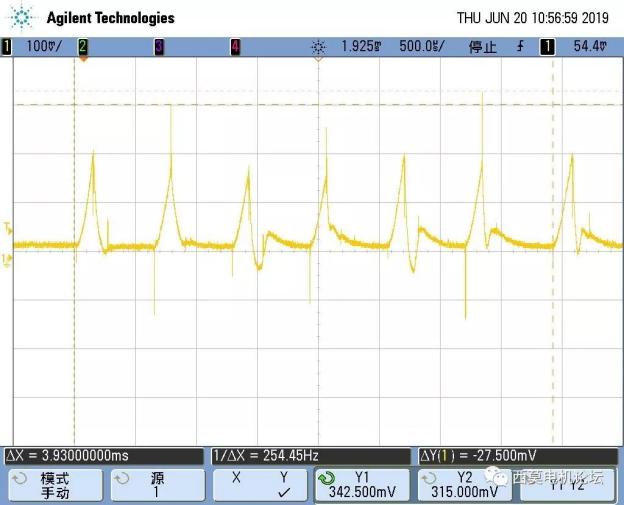
图15 电感法测转子位置波形图-3
当然,针对不同的电机,定位时间是有很大区别的,时间不宜太短,没到饱和可能测不出来电流的差异性;也不宜太长,太长可能导致电机抖动。具体还需个别电机区别对待。从一致性角度看,电感法没有强拉一步适应性强,会产生噪音,优点是不会反转。
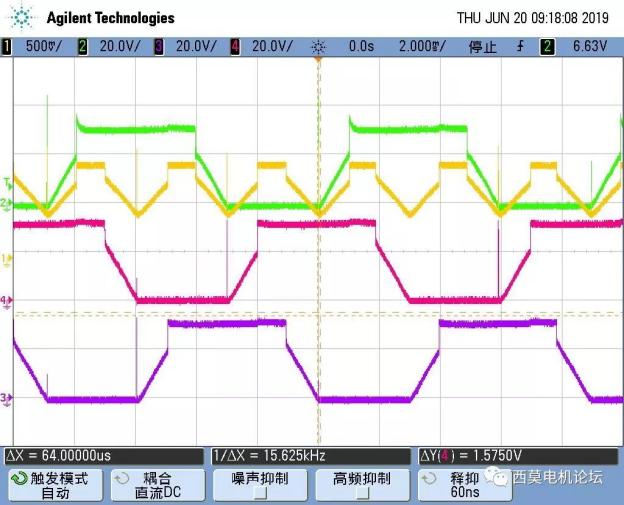
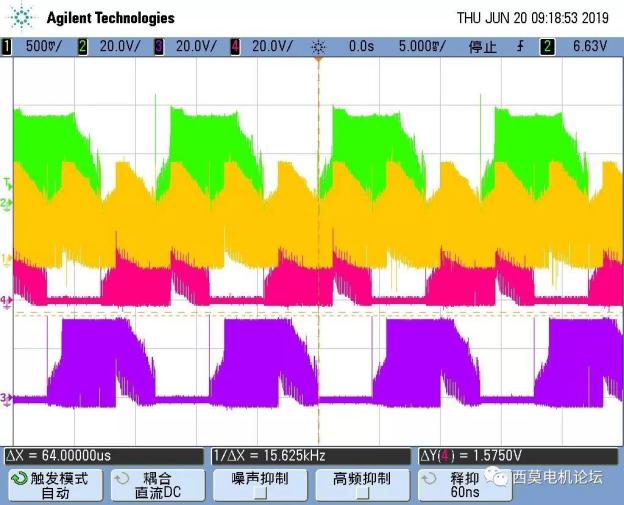
使用电感法启动和运行的波形如下图16和图17所示,对比前面的图10和图11可以发现,使用电感法之后,由于起始位置准确,在后面换相的前几步明显比强拉和开环运行方式好很多,前几步换相已经很接近梯形波,接近转子反电势波形。
对于电感法定位,除了可以采用检测母线电流之外,还可以通过检测不导通相的反电势来定位。虽然检测的变量不同,但是方法和原理是一致的,在此不多加叙述。
2.4 高速运行时刻换相
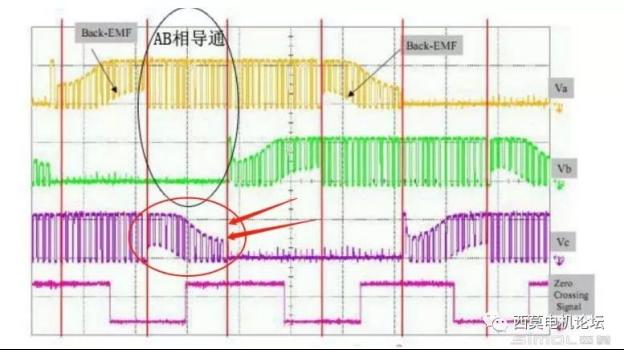
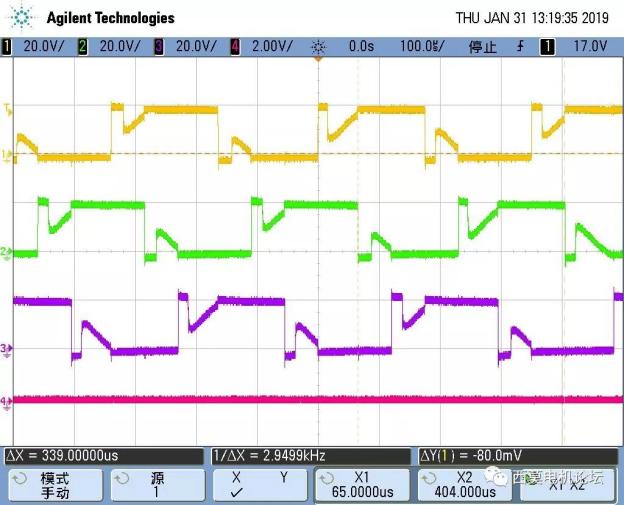
高速换相也是无位置传感器直流无刷电机不可不说的问题。由于直流无刷电机的控制使用了三相全桥逆变器,为了不使逆变器的上下桥直通导致炸管烧电机,必须在驱动的时刻加入死区时间。因为死区时间的加入,不可避免的出现上下桥全关的状态,但是此时电机里面还是有电流的,电流必须流出去,所以就会从mosfet的续流二极管进行续流(对于foc控制,很多场合就是在此刻采集,电流是不会突变的,具体可以示波器观测电流波形)。由于出现续流时刻,那么对于反电势检测来说就不可避免的出现了误判过零的现象,所以才过零点判断的时刻必须避开续流时刻,续流波形见下图18紫色部分,在紫色反电势波形从母线开始到反电势下降的时刻连接点有一个长时间的低电平状态,在紫色波形从电压0V到开始有反电势电压也有一个高电平状态,这两个就是续流的阶段,在这两个阶段如果检测过零点是会出现误判的,会导致电机换相不正确甚至堵转的问题,可能引发控制器和电机发热,发生烧坏电机和功率器件的问题,所以这两个阶段是必须避开的,在软件处理里,每次换相结束之后要留出一段时间不检测过零点,这样才可以使程序正确的运行,让电机工作在正常状态。
方波换相什么时刻最好一直是工程师研究的问题,下面用几个波形来简单说明一下,先看图19,
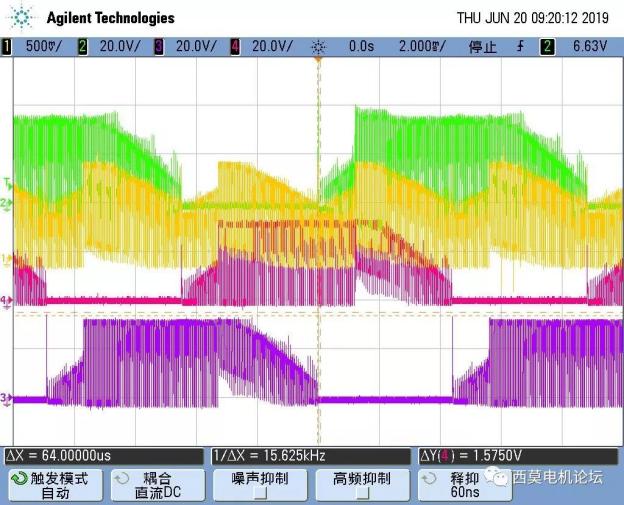
下面再给出一个换相时刻很好的波形,见图22,
3 结论
本文对无位置传感器的无刷直流电机控制的原理进行了详细说明,并利用大量的理论和实测数据对电机运行控制过程中的启动、低速及高速换相问题进行了详细说明,有效的解决了定位、高速准确换相的问题,提高了高速运行时刻的电机工作效率,解决了高速噪声问题。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




