成功批量交付!纽迪瑞人形机器人触觉传感器!
来源:纽迪瑞
发布时间:2024-11-12
人形机器人,机器人品类中公认最复杂的产品形态。具有类似于人类的外观和肢体结构,能够进行行走、奔跑、抓取和操作工具等人类行为,代替人类完成更多样、复杂且精细的工作任务。
同时人形造型接受度更高,更容易与用户建立情感链接,与其互动交流。广阔的应用前景与巨大的商业机会,让其受到市场的广泛关注与热捧。而随着底层技术的不断进步,可以预见人形机器人将逐步走向成熟实现量产,造福万千家庭。
>>当人形机器人走进现实
感知系统是人形机器人具备工作能力的基础,通过感知-决策系统的同时协作,人形机器人得以精确执行工作任务。
其中,触觉感知作为机器人与物理世界接触的唯一感知,是人形机器人的核心感知能力。通过触觉传感器可以获取物体的重量、刚度、变形等触觉信息,更好地执行工作任务,保证机器人的工作稳定性和安全性。尤其是当视觉受阻或在复杂环境执行工作时,触觉感知可以为人形机器人实现更加可靠的执行结果。
>>NDT机器人触觉传感器
NDT机器人触觉传感器基于压阻式原理,传感器在受力时发生微小形变,电阻阻值相应产生变化,并通过惠斯通电桥输出差分信号,最终实现精准的受力大小与位置检测。
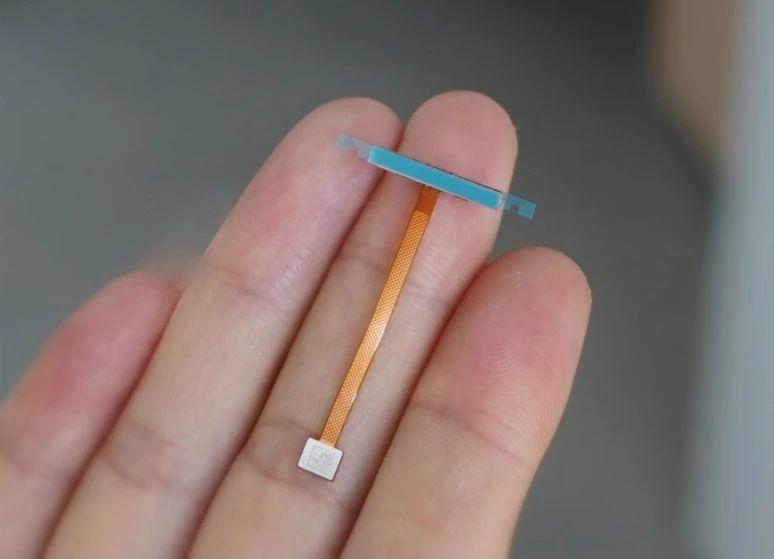
NDT机器人指尖触觉传感器实物图
相比于其他原理,NDT机器人触觉传感器具有高灵敏度、极简安装、持久耐用等优势。
NDT机器人触觉传感器优势:
1. 高灵敏度,最高可识别0.05N力的变化。
2. 极简安装,NDT提供带触觉传感器的指关节模组,可以直接安装替换原有指关节,装卸简单,便于初代人形机器人改装与升级换代。
3. 持久耐用,历经千万次的寿命测试。

应用在灵巧手中,则可以做到手指端的灵活触觉感知,灵敏识别手指端接触物体的着力点与力的大小,实现多种功能。
灵巧手功能
1. 压力分布感知
提供机器人手指末端与物体接触表面的压力分布信息,帮助机器人感知物体重量、形状等信息,自适应调整最佳的手指抓拿方式和力度,实现精确操控。
2. 振动感知
检测物体的振动频率和幅度,帮助机器人判断物体运动状态,识别机器故障或不稳定情况。
3.温度感知
对于需要处理高温/低温物体的机器人而言,NDT触觉传感器通过集成温度传感器,可以提供接触物体的温度数据,有效避免机器人损坏及安全事故发生。
凭借十余年的丰富技术和经验积累,与近几年的潜心研发,纽迪瑞已成功批量交付用于机器人灵巧手的触觉传感器,引领行业先河。让我们共同期待客户人形机器人产品正式发布!


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




