
一文读懂惯性导航&陀螺仪传感器行业概况
惯性导航(Inertial Navigation System,INS)也简称为惯导系统,是一种不依赖外部导航信息的自主式导航定位技术。其基本工作原理是通过测量线加速度和角速度来解算运载体位置信息并实现定位导航。
小型武器, 民用设备, 消费电子, 航空, 地面装备, 高端工业, 测绘, 资源勘探, 车辆, 飞行器, 航海, 测绘制导武器, 航天航海, 加速度计, 惯性测量单元, 陀螺仪
行业动态
 2025-08-13
2025-08-13

IMU惯性导航传感器在扫地机器人中的应用
惯性导航是一种利用陀螺仪和加速度计来测定运载体位置的一个系统。不依赖于外部信息、也不向外部辐射能量的自主导航系统,其工作环境不仅包括空中、地面、还可以在水下。它可以输出载体相对运动时的三轴角速度、三轴加速度、欧拉角、四元数、温度等数据。
图像传输, 电调, 机器人, 家庭机器人, 稳定陀螺仪, 无人机, 管道机器人, 无人机电源, 服务机器人, 陆地机器人, 物料搬运机器人(AGV), 商用机器人, 特种机器人, 巡检机器人, 工业智能, 工程机械, 教学机器人, 水下机器人, 飞控, 陀螺仪, 加速计, 运动传感器
应用方案
2025-02-11

新品发布!HI13系列 IMU ROS 陀螺仪 加速度计 姿态传感器 倾角模块 惯性导航
HI13系列是利用高性能、小体积、工业级MEMS惯性器件感知物体姿态信息的姿态感知系统,它集成了惯性测 量单元(IMU)、磁力计、气压计和一款搭载扩展卡尔曼融合算法(EKF)的微控制器。可输出经过传感器融合算法 计算得到的基于当地地理坐标的三维方位数据,包含有绝对参考的航向角,俯仰角和横滚角。同时也
机器人, 家庭机器人, 安全性与舒适性, 无钥匙进入系统(PEPS), TPMS, 动力域, 服务机器人, 主动行人保护系统(APP, 物料搬运机器人(AGV), 车距控制辅助系统(DCA), 特种机器人, 倒车雷达系统(PDC), 座椅/门窗等小电机系统, 水下机器人, 下坡行车辅助控制系统(DAC), 智能驾驶辅助/自动驾驶系统, 无人机, 其他, 管道机器人, 底盘域, 安全气囊, 电子水泵/油泵, 巡检机器人, 工业智能, 智能座舱域, 汽车空调与气候控制(ACC/CCS), 自动驾驶域, 无钥匙门禁系统(PKE/RKE), 安全气囊控制(ACM), 车身域, 商用机器人, 尾气处理系统SCR, 防撞警告系统(EAS), 车灯, 汽车安全与舒适类, 泊车辅助系统(PS), 车身控制模块(BCM), 盲点信息系统(BLIS), 汽车空调, 电子控制悬挂系统(ECS), 汽车防盗系统(EAS), 陆地机器人, 发动机防盗锁系统(IMMO), 胎压检测系统(TPMS), 底盘控制模块(CCM), 电动助力转向系统(EPS), 教学机器人, 汽车电子, 乘员感知系统(OPDS), IMU惯性单元, 运动传感器, HI13, HI13R4T-USB, HI13M3N-USB, HI13R4N-USB, HI13M0N-USB
新品介绍
2025-02-11
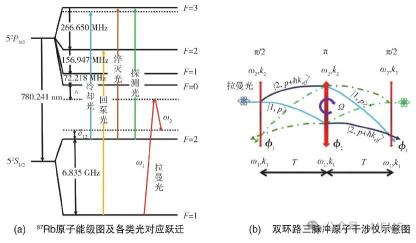
高精度的原子干涉陀螺仪应用方案
高精度转动测量在基础物理、地球物理和惯性导航等精密测量领域有着重要的科学前景和应用价值。原子干涉陀螺仪利用物质波干涉和萨格纳克效应,可实现高精度转动测量,具有灵敏度高、长期稳定性好和无机械磨损等特点。随着近年来原子干涉陀螺仪技术的快速发展,其研究方向正在从实验室向实际应用发展和转换,但这一过程中面临
军事导航及通讯, 汽车通讯及导航, 娱乐与信息系统, 国防科研, 工业智能, 汽车电子, 陀螺仪, 运动传感器
技术分享
2025-03-04

Xsens Vision Navigator:结合视觉、惯性和GNSS技术,为室内外定位提供全新解决方案
在现代机器人技术的发展中,定位的精度和稳定性一直是一个重要的研究领域。Xsens Vision Navigator (XVN) 这款传感器结合了视觉、惯性和GNSS技术,为室内外定位提供了全新的解决方案。
AI机器人, 机器人, 商用机器人, 物料搬运机器人(AGV), 教学机器人, 特种机器人, 水下机器人, 服务机器人, 位置(速度)传感器, 陀螺仪
应用方案
2025-06-24

Murata SCR410T-K03陀螺仪
是Murata公司生产的一款表面贴装式的高性能角速率陀螺仪,用于测量和检测物体旋转角速度。它基于Murata公司成熟的电容式 3D-MEMS 技术,通过测量转子旋转时产生的科里奥
汽车通讯及导航, 图像传输, 侧翻检测系统(RDS), 飞机修造, 主动行人保护系统(APPS), 汽车动力系统类, 车辆稳定性控制(VSC/ES, 无钥匙门禁系统(PKE/RKE), 安全气囊控制(ACM), 电子控制喷油装置(EFI), 电子点火控制(ESA), 机场及空管设施, 车距控制辅助系统(DCA), 机载设备, 传动系统综合控制(PCM), 防撞警告系统(EAS), 倒车雷达系统(PDC), 汽车安全与舒适类, 飞控, 汽车仪表与显示(EIS), 泊车辅助系统(PS), 车道偏离警示系统(LDWS), 下坡行车辅助控制系统(DAC), 电调, 稳定陀螺仪, 盲点信息系统(BLIS), 智能驾驶辅助/自动驾驶系统, 无人机, 电子控制悬挂系统(ECS), 无人机电源, 汽车防盗系统(EAS), 发动机防盗锁系统(IMMO), 胎压检测系统(TPMS), 底盘控制模块(CCM), 车人机界面(MMI), 电源, 电动助力转向系统(EPS), 驱动防滑控制系统(ASR), 汽车空调与气候控制(ACC/CCS), 乘员感知系统(OPDS), 影音及娱乐系统(A/V), 制动辅助系统(EBA), 电子差速锁(EDS), 陀螺仪, SCR410T-K03
新品介绍
2024-04-29




