电子皮肤最新综述-当电子皮肤拥有 “3D” 智慧触觉
来源:i学术i科研
发布时间:2025-06-12
研究成果
综述要点
剪切传感能力:3D 架构电子皮肤在剪切力检测上具有独特优势,平面设计的电子皮肤难以实现这一点。其剪切传感原理主要有三类:通过在 3D 空间部署不同方向的应变计,利用应变计的伸长和缩短来推导剪切变形;借助 3D 架构将剪切载荷转化为组件间压力进行测量;基于位移检测,利用电、磁或光场的变化来感知剪切。
解耦传感能力:在多种刺激同时出现时,解耦传感对于保证测量准确性至关重要。3D 架构电子皮肤可通过物理结构设计减少压力、剪切、拉伸和 / 或温度等各种载荷之间的相互干扰。例如,通过局部硬化弹性体基板或中断载荷传递路径实现压力测量的应变不敏感性;通过引入高度差或合理定位应变传感器实现应变测量时排除压力干扰,进而实现压力和应变的解耦传感 。
3. 3D 架构触觉电子皮肤的先进触觉感知形式
超分辨率触觉传感:超分辨率触觉传感是先进触觉感知的代表,通过将传感器阵列嵌入弹性体中,获取信号输出并映射变形场,从而精确测量力的位置和强度。3D 架构对于实现高的超分辨率因子至关重要,它能优化载荷传递路径,过滤噪声。多种 3D 架构的电子皮肤已展示出超分辨率触觉传感能力,如基于多层结构的生物模拟电子皮肤、基于气压计阵列的触觉系统以及磁敏电子皮肤等 。
物理属性和表面特征感知:物体识别是智能机器人的基本任务,触觉传感在其中不可或缺。许多物理属性和表面特征(如弹性模量、热导率和粗糙度等)难以通过其他传感方法评估,而 3D 架构电子皮肤可通过巧妙的结构设计或数据驱动方法来测量这些属性和特征。例如,基于膜的传感器可测量弹性模量,结合深度学习的触觉系统能同时测量弹性模量和局部主曲率,带有指纹和快慢适应传感器的触觉皮肤可预测表面粗糙度和分类纹理,集成加热器的触觉传感器能测量热导率 。
系统级智能驱动的应用:模仿人类皮肤机械感知的 3D 架构电子皮肤为智能系统与环境的复杂交互提供了支持。集成了 3D 架构电子皮肤的系统在物体识别、食品检测、健康监测、人机交互、灵巧操作和感觉再现等领域展现出广阔的应用前景 。
图文导读
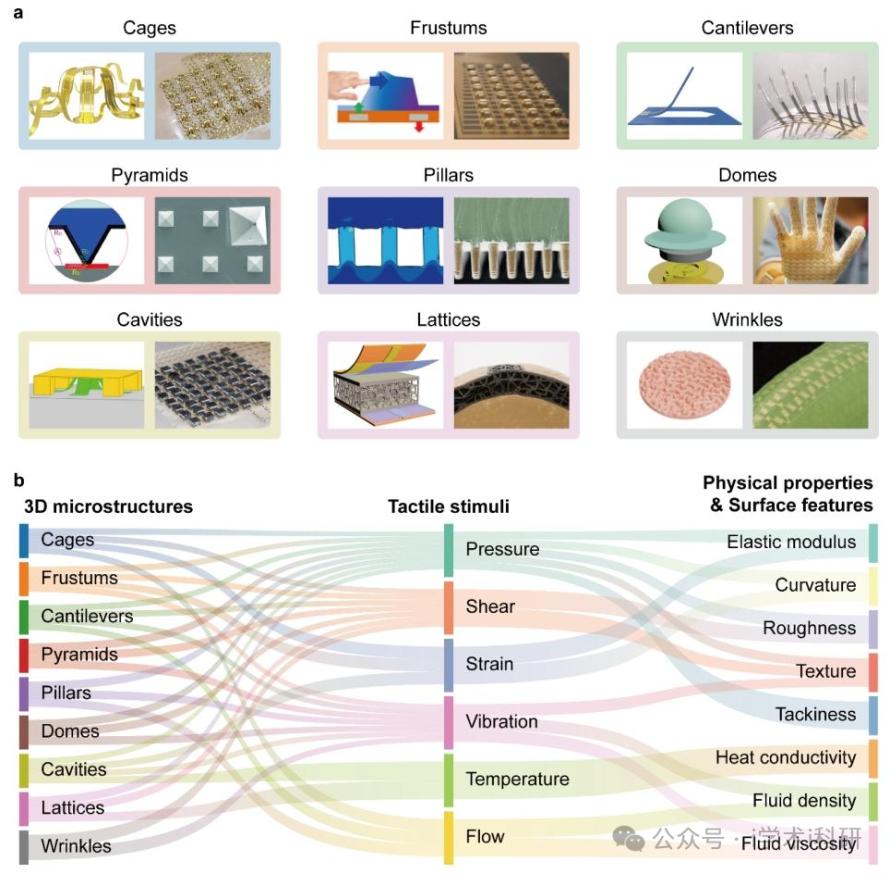
Figure 1. A diversity of 3D microstructures exploited in electronic skin to determine physical properties of an object via tactile information.
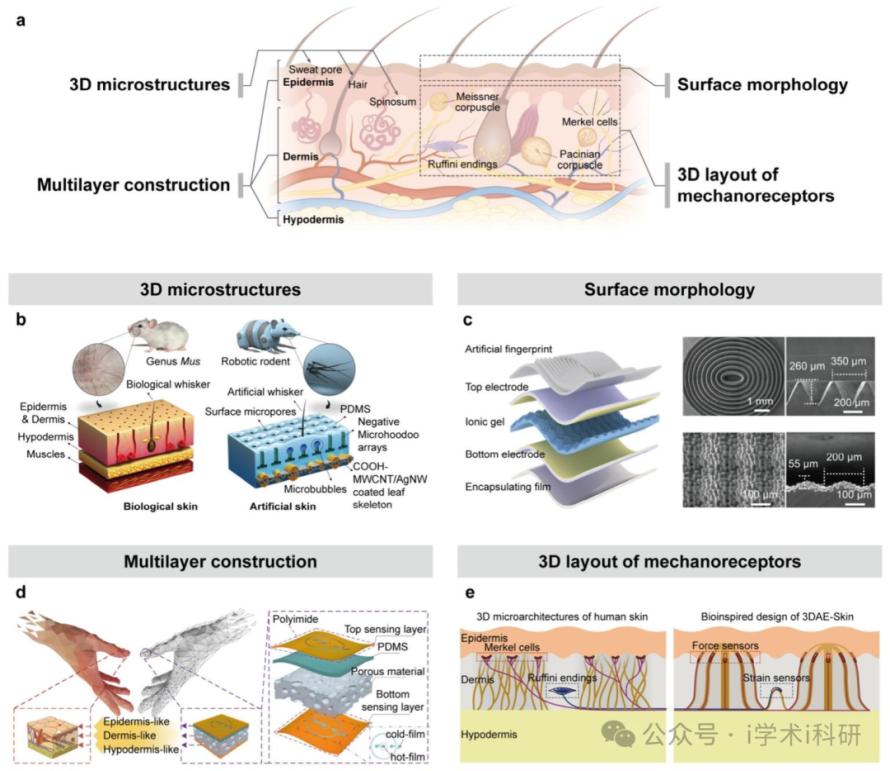
Figure 2. Bioinspired designs of 3D architected tactile electronic skins.
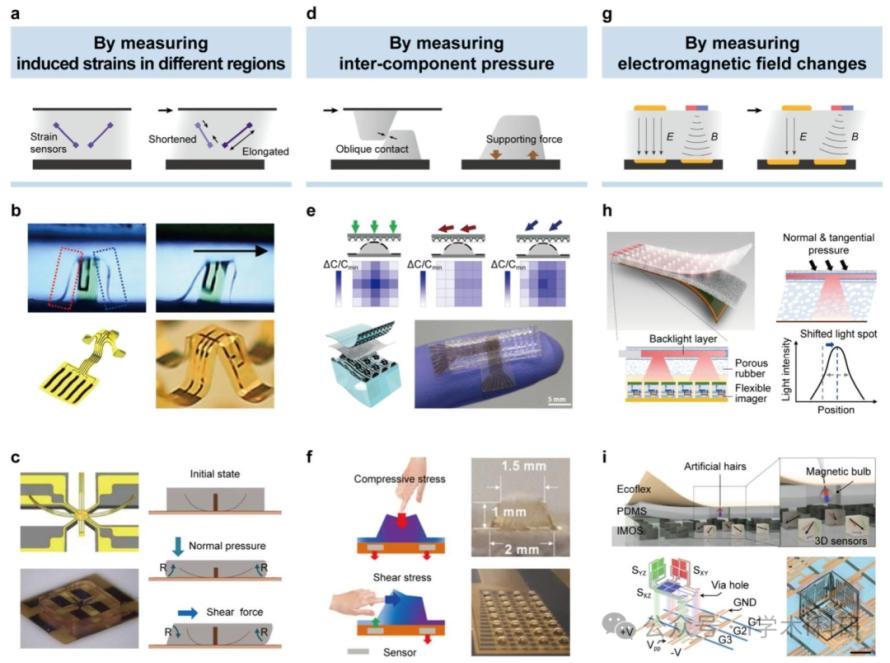
Figure 3. Shear sensing using 3D architected tactile electronic skins.
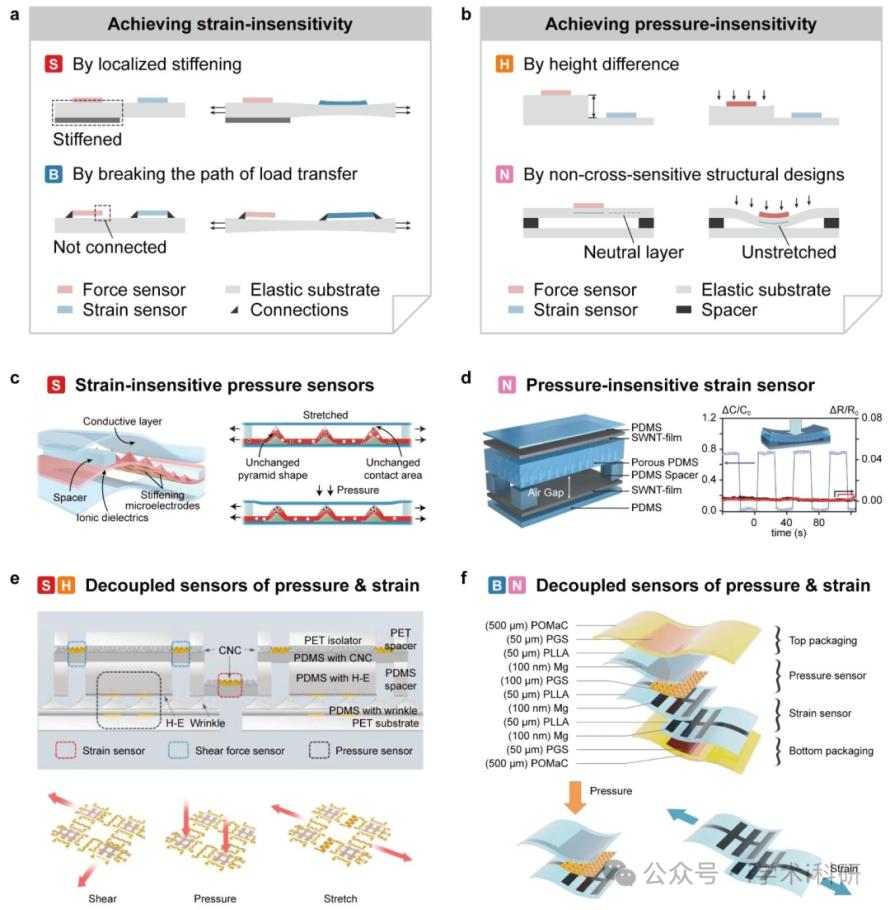
Figure 4. Decoupled measurement of pressure and strain using 3D architected tactile electronic skins.
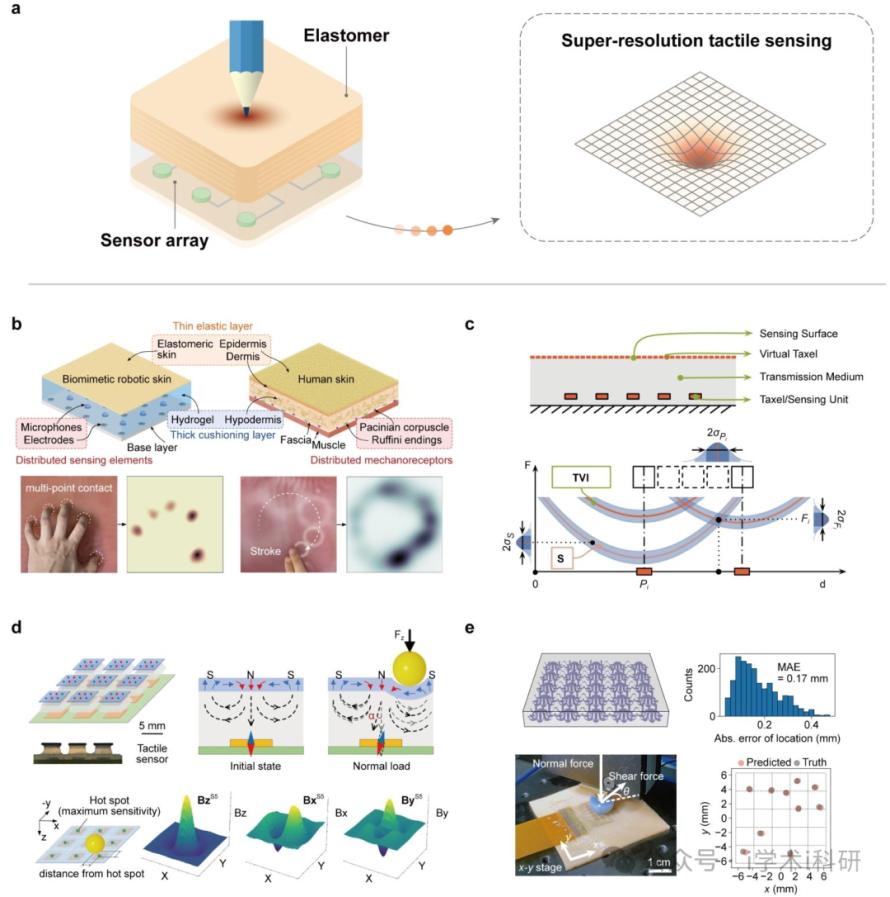
Figure 5. Super-resolution tactile sensing using 3D architected electronic skins.
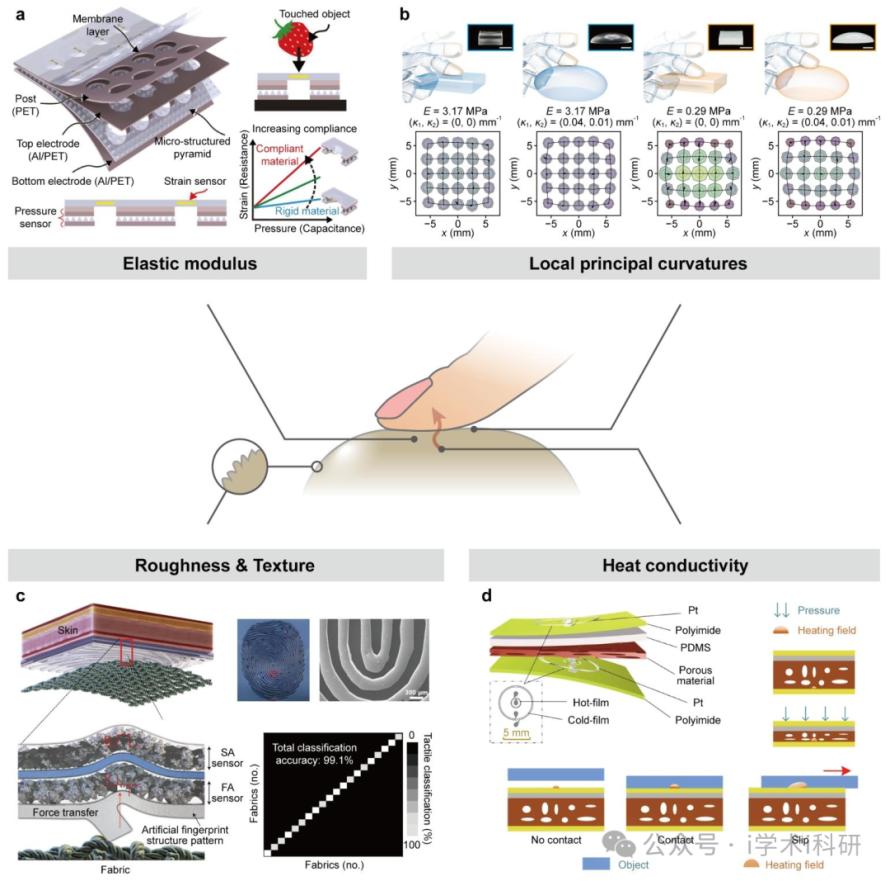
Figure 6. Measurement of physical properties of an object using 3D architected tactile electronic skins.
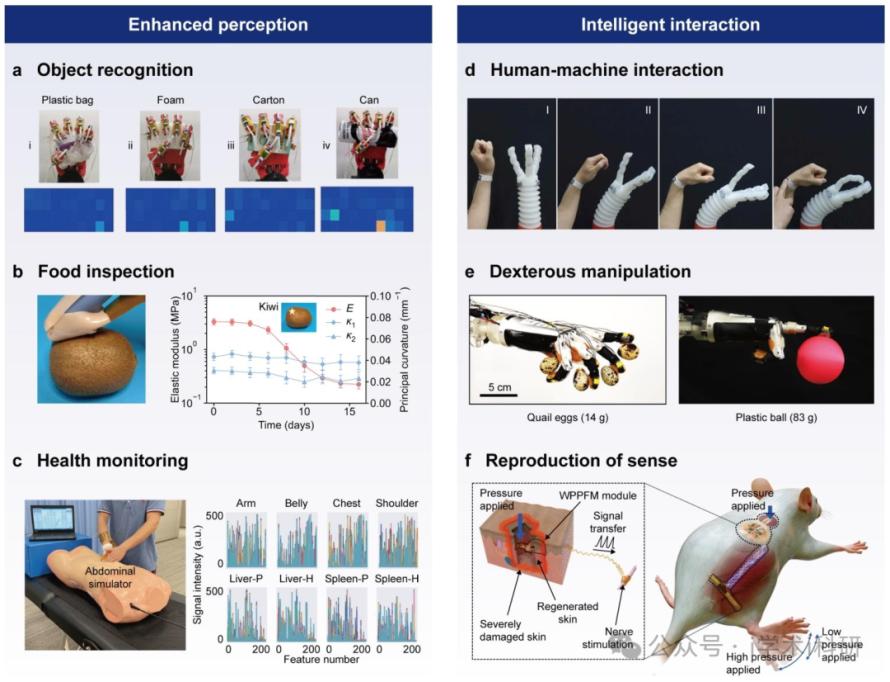
Figure 7. Applications of enhanced tactile sensing achieved by 3D architected electronic skins.
总结与展望
本文聚焦于 3D 架构触觉电子皮肤这一前沿领域,系统阐述了其从仿生设计、传感能力提升到先进感知应用的多方面进展。人类皮肤的复杂 3D 结构和机械感受器分布是其强大触觉感知的基础,受此启发,研究人员从多个层面模仿皮肤结构设计电子皮肤,显著提升了触觉传感性能。在传感能力上,3D 架构电子皮肤解决了平面设计电子皮肤在检测剪切力和解耦多种机械刺激感知方面的难题,为精确感知复杂触觉信息提供了可能。同时,借助超分辨率触觉传感、物理属性和表面特征感知技术,结合系统级智能应用,其在物体识别、人机交互、健康监测等领域展现出广阔的应用前景。
尽管 3D 架构触觉电子皮肤取得了显著进展,但目前人造电子皮肤与人类皮肤在微观结构复杂性、物理 / 生化属性、机械感受器密度 / 多样性以及功能等方面仍存在较大差距,这也为该领域带来了诸多发展机遇:
(1)组件集成挑战与机遇:实现高密度、异质的各类传感组件在仿生 3D 布局中的集成,且达到接近人类指尖机械感受器的物理分辨率是一大挑战。目前虽有针对平面有机材料系统中可拉伸、高密度压敏晶体管阵列和功能电路的加工技术,但开发适用于多种传感材料和组件(如金属、硅、压电材料、液态金属等)微图案化的新型制造技术仍是未来研究的方向。
(2)复杂表面适配难题:将 3D 架构电子皮肤稳定、可靠地贴合在非可展表面并保持触觉传感精度是当前面临的难题。现有电子皮肤多为平面薄膜状,在贴合复杂曲面时会发生大变形,影响传感精度。未来需要开发特殊设计的架构和信号处理算法,以确保在各种复杂表面上的适用性。
(3)非线性物理属性感知的突破:理解物体的非线性物理属性(如橡胶的硬化效应、软组织的非线性应力 - 应变行为等)对人类和智能系统与物体的有效交互至关重要,但现有 3D 架构电子皮肤大多未考虑这些特性。未来可通过设计可变形的 3D 架构和开发先进的信号处理算法,结合相应物理模型来解决这一问题。
(4)系统集成的探索:当前多数触觉系统中,电子皮肤、数据采集和信号处理模块相互分离,导致系统复杂、庞大。开发具有传感器上计算能力的 3D 架构触觉电子皮肤,有望简化系统,这是一个有待深入探索的方向。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




