ADAS崛起,MEMS传感器如何赋能汽车智能化?
来源:智能传感器网
发布时间:2025-04-10
在汽车智能化的大潮中,ADAS(先进驾驶辅助系统)正引领驾驶体验从“人主导”迈向“机器主导”的新时代。而这一切变革的关键,正是MEMS传感器所提供的技术支撑。它们宛如无人驾驶的“感知触角”,凭借精准的环境感知与高效的数据传输,为ADAS系统输送着至关重要的决策信息。随着ADAS市场的迅猛发展,MEMS传感器的重要性日益突出,已然成为无人驾驶技术落地的关键推动力量。
ADAS系统解析
一、ADAS市场现状与前景
目前,L1 - L2 级别 ADAS 在全球和国内的渗透率分别为 50% - 60% 和 40% - 50%。有预测称,到 2030 年,全球 ADAS 市场规模将达到 651 亿美元,中国 ADAS 市场规模将达 4667.27 亿元。ADAS 系统在汽车领域的广泛应用和未来巨大的市场潜力,使其成为汽车智能化发展的关键环节。
二、ADAS 功能详解
自适应巡航系统 ACC
一种前向监测系统,通常运用雷达传感器检测汽车前行并保持固定距离。驾驶员设定期望速度范围,若系统感知前方车辆距离缩小,会自动降低发动机功率和 / 或激活车辆制动器,以维持安全距离且不超目标速度。
前方碰撞预警系统 FCW
由 ACC 系统扩展而来,常与 ACC 共享雷达 / 激光雷达 / 摄像头传感器,用于提供即将发生碰撞的预警。系统通过计算前方车辆距离及相对速度,确定可能碰撞时间并向驾驶员发出警告信号。
自动紧急制动系统 AEB
同样是前方监控系统,借助雷达 / 激光雷达 / 摄像头传感器感知前方路面障碍物。若检测到可能碰撞,先向驾驶员发出制动警告,若驾驶员未响应,则系统直接制动,以避免碰撞或减轻碰撞影响。
夜视以及行人检测系统 NV&PD
利用红外图像传感器,探测范围超出前大灯照明区域,提供黄昏和夜间前方道路图像。红外线摄像机一般位于前保险杠下方或挡风玻璃内部后视镜后面。行人检测是其扩展功能,通过软件分析处理采集图像,区分物体和行人,在识别行人时向驾驶员发出警告。
车辆偏航预警系统 LDW
属于横向监控系统,用于监控车辆在当前车道的位置,提醒司机意外的车道漂移。该系统通过位于挡风玻璃内部后视镜后面的摄像机监视前方道路的车道标志,当检测到车道偏离时,可向驾驶员发出声音或触觉反馈,也可通过其他系统主动引导车辆返回车道。
交通标志识别系统 TSR
作为前方监控系统,常与车道偏离预警系统使用相同相机,用于监控前方道路交通标志,主要功能是提醒司机当前限速。
盲区检测系统 BSM
侧面和后方监控系统,在司机打算改变车道、超车时,帮助和提醒司机盲点区域车辆的存在。
驾驶员监控系统 DM
持续监测用户驾驶风格,通过监视驾驶员面部表情或某些驾驶风格(如转向),发现嗜睡和疲劳迹象。
自动大灯调节系统 AHD
夜间驾驶辅助功能,基于周围照明和前方交通条件,利用与 LDW 或 TSR 相同的前摄像头作为监控系统,自动调节前大灯强光弱光。
后方横向交通告警系统 RCTA
为 BSM 的拓展功能,通常与 BSM 共享相同雷达传感器,在倒车时有接近车辆时警示司机,部分系统会提供声音报警或闪烁后视镜里的 BSM 图标。
半自动泊车辅助 SAPA
即常见的自动泊车,使用位于前后保险杠中的雷达或超声波传感器检测合适的空置车位,系统自动驾驶车辆进入停车位,但需司机适当控制油门和刹车。
这些 ADAS 功能的实现,离不开各类传感器的支持,传感器如同 ADAS 系统的 “触角”,为其提供准确的环境信息,从而实现相应的辅助驾驶功能。
车传感器与ADAS
一、ADAS 中的关键传感器类型
汽车自动/辅助驾驶系统所用到传感器主要包括微波/毫米波雷达、超声波传感器、摄像头、激光雷达。各类传感器在测量范围、精准度和有效距离等方面各有优劣,因此在各类辅助驾驶 / 无人驾驶解决方案中基本采用多传感器融合的方式。例如,在自适应巡航系统 ACC 中,雷达传感器用于检测前方车辆距离和速度;在车辆偏航预警系统 LDW 里,摄像头用于识别车道标志。不同的 ADAS 功能依赖特定类型或组合的传感器来实现精准感知。
二、传感器市场格局
在传统汽车传感器市场,少数欧美日巨头长期垄断全球市场。例如,中国 90% 的车用传感器市场被大陆、博世、德尔福、森萨塔、霍尼韦尔等外资企业占据。不过,随着汽车行业发展,情况有所变化。一方面,雷达、ABS 等越来越多地成为整车企业的前装产品,这类传感器需求迅速上升。另一方面,汽车排放标准不断提升,对传感器在材料和工艺上有更严格要求。国内部分企业也崭露头角,如国内一款拥有专利技术的氮氧传感器,赶上国内汽车排放升级的契机,在柴油车市场占有率达 100% 。
ADAS 系统的毫米波雷达市场集中度高,长期被国外汽车零部件巨头垄断,研发地主要集中在德国、美国和日本等国家,主要公司有博世、大陆、海拉、富士通天、电装、天合、德尔福、奥托立夫等。近年来,国内微波 / 毫米波雷达传感器企业逐渐涌现,多为初创企业,普遍缺乏车载行业背景。与此同时,越来越多的汽车产业链供应商,如沪电股份、亚太股份、华域汽车等大厂,纷纷通过自主研发、国际合作、投资创业团队等方式加速布局 ADAS 领域。
无人驾驶与MEMS传感器
无人驾驶汽车的实现需要大量的 MEMS 相关技术支持,其中最重要的就是大量的传感器感知定位。核心技术是包括高精度地图、定位、感知、智能决策与控制等各个模块。其中有几个关键的技术模块,包含精确GPS定位及导航、动态传感避障系统、机械视觉三大部分(如图所示)。
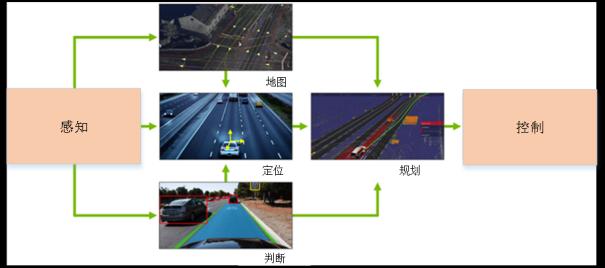
无人驾驶系统基本原理
无人驾驶系统通过传感器感知车辆当前所处状态(位置、周围车辆、行人障碍物等),由决策算法得出最优的行驶策略,最终由控制部分将此策略转换为车身部件实际操作。在实际应用中,由感知系统和高精度地图可实现对车辆行驶位置精确定位(SLAM),感知系统为自动驾驶车辆提供周围车辆、行人、车道线等环境信息,为规控系统计算最优行驶策略提供依据。
无人驾驶汽车专用传感器主要分为光学和非光学两大类。光学类传感器主要包括红外传感器和可见光传感器等,主要用于摄像头;非光学传感器主要包括压力、温度和速度传感器以及地磁传感器(电子指南针)、侧翻传感器、陀螺仪等。
· 无人驾驶主要传感器
无人驾驶传感器主要包括:摄像头、红外传感器、毫米波雷达、中短距离毫米波雷达、长距离 毫米波雷达、激光雷达、超声波雷达。
摄像头
具备360度的同步视野,而人类驾驶员只能看到120度的视野。感光芯片每秒记录N组(帧)数字形式的图像,通过车载以太网或 LVDS 方式发送给自动驾驶系统的计算机,计算机通过图像识别技术分析数据,由于高清视觉系统能够探测颜色,因此可以帮助系统识别交通信号灯、施工区、校车和急救车的频闪灯,进而判断车辆周围状况。摄像头技术对应传统的人眼视觉,应用中摄像头形式包括单目、双目和三目,根据摄像头安装的位置分为前视、后视、环视和车内监控摄像头。Google 无人驾驶项目 Waymo 的视觉系统由多组高清摄像头组成,目的是在白天和低光照条件下都能看清远方的物体。
远红外传感器
远红外传感器用红外线为介质,只考虑观测主体与环境之间温度差,可以不受光线情况影响。远红外热成像原理,通过能够透过红外辐射的红外光学系统将视场内景物的红外辐射聚焦到能够将红外辐射能转换为便于测量的物理量的器件-红外探测器上,红外探测器再将强弱不等的辐射信号转换成相应的电信号,然后经过放大和视频处理,形成可供人眼观察的视频图像,最终通过显示终端显示、音响设备报警的夜间辅助驾驶产品。
毫米波雷达
通过发送电磁波(毫米波),测量反射波从发射到接收的时间,计算车辆到各个目标的距离。雷达的多普勒效应可以用以测量目标速度。毫米波雷达抗干扰能力强,作用范围大,但不能对目标进行识别,分辨率较低。
激光雷达
发射激光(波长600~1000nm),通过反射脉冲的飞行时间(TOF)测量距离,激光雷达在短时间内可发送大量激光脉冲(每秒可以向360度的方向发出数百万激光脉冲,并且可以测量激光从一个表面反射回汽车所花费的时间),通过旋转镜头方式构建周围较大扫描区域内的3D点云数据。激光雷达不仅作用距离大,昼夜均可使用,还可以测量速度,而且具备很好的目标识别能力,缺点是成本较高。
超声波雷达
超声波雷达,测量发射超声波(>20kHz)反射回来的时间,从而判断障碍物的存在和距离。超声波雷达的缺点是作用距离短,传输依赖介质,速度慢,只适用于低速下的停车辅助。
由工作机制决定的固有属性,让不同传感器适用于不同的应用场景。没有一种传感器可以满足自动驾驶所有类型的任务,在实际应用中要结合不同传感器的优势,利用传感器融合技术,为自动驾驶汽车提供全面、及时和准确的周边环境信息,便于自动驾驶系统做出最准确的决策。常见无人驾驶传感器及其功用如表所示。
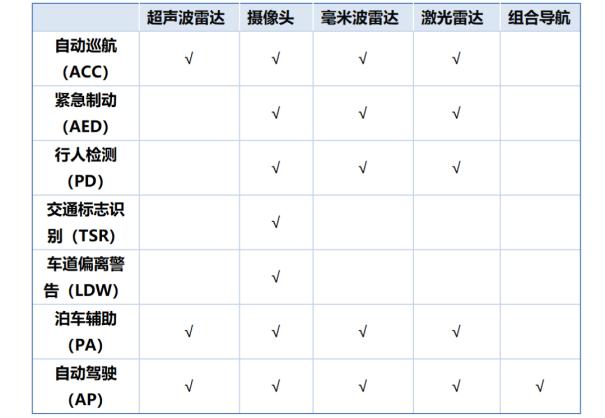
无人驾驶传感器及其功用
· 传感器分布
在自动驾驶汽车上,传感器的分布、功能及作用范围大致如图所示。由图可以看出不同类型的传感器作用的范围(距离 & 角度)有所差别,应用中需要使用多个不同类别的传感器,分布在车身的不同位置以实现对车辆周围环境360°无死角覆盖。
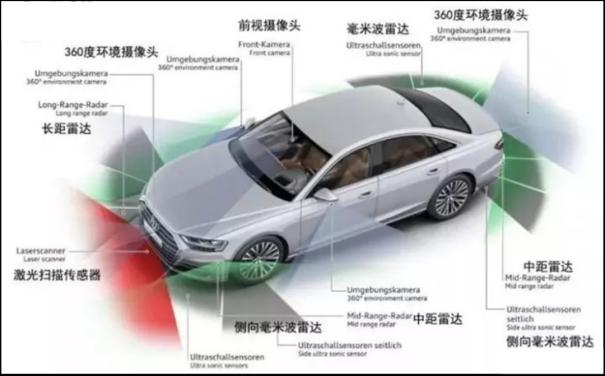
无人驾驶汽车传感器分布
当前自动驾驶/ADAS的关键部件,比如高精度惯导、激光雷达的成本非常之高,Google 无人驾驶车上使用的 Velodyne 64 线激光雷达价格高达 $75,000,整套设备成本在 $150,000 左右。随着市场化和技术的发展,激光雷达等传感器成本必然会逐渐下降。在激光雷达领域,Velodyne 已推出低成本的16线产品,售价 $8,000;创业公司 Quanergy 也承诺将推出成本 $250 左右的低成本激光雷达。
· 典型无人驾驶传感器组合
目前,国际上自动驾驶环境感知的技术路线主要分为两种:一种是以特斯拉为代表的视觉主导的多传感器融合方案,另一种是以激光雷达为核心的高精度感知方案,典型代表如 Waymo、小鹏、蔚来等。随着技术进步和成本下降,这两种路线正在逐步融合,形成更加多元化的解决方案。
Tesla
特斯拉的自动驾驶方案以视觉感知为核心,结合毫米波雷达和超声波传感器,形成了独特的“纯视觉+AI”技术路线。早期的 Autopilot 系统依赖 MobileEye 的摄像头技术,但在经历撞卡车事件后,特斯拉逐步转向以神经网络驱动的视觉系统为主,毫米波雷达为辅。目前,特斯拉的感知系统包括8个摄像头(覆盖360度视野)、12个超声波传感器和1个前置毫米波雷达。通过强大的AI算法,特斯拉能够实现自动巡航、自动变道、紧急刹车等功能,并逐步向完全自动驾驶(FSD)迈进。
Waymo
Waymo则坚持激光雷达主导的技术路线,结合毫米波雷达和摄像头,构建高精度环境感知系统。Waymo的自动驾驶车辆搭载了多款自研激光雷达,包括短距离、中距离和长距离激光雷达,能够实现360度无死角的环境感知。此外,Waymo还配备了多个摄像头和毫米波雷达,用于补充激光雷达的感知能力。这种方案在复杂城市环境中表现出色,但成本较高,主要应用于Robotaxi等商业场景。
Audi
奥迪的自动驾驶方案采用了多传感器融合的策略,结合激光雷达、毫米波雷达、摄像头和超声波传感器,构建了全面的环境感知系统。其传感器组合包括12个超声波传感器、4个高清鱼眼摄像头、1个高清3D摄像头、1个红外夜视摄像头、4个毫米波雷达和1个激光扫描器。这种方案在豪华车型中广泛应用,能够实现高级辅助驾驶功能,并为未来更高阶的自动驾驶奠定基础。
随着激光雷达成本的下降和AI算法的进步,视觉主导与激光雷达主导的路线正在逐步融合。例如,特斯拉开始探索低成本的4D毫米波雷达,而Waymo也在加强视觉感知的能力。未来,自动驾驶技术将更加依赖多传感器融合和AI算法,以实现更高安全性、更低成本的商业化落地。


免责声明
- 1、本文内容版权归属原作者、原发表出处。若版权所有方对本文的引用持有异议,请联系感算商城(service@gansuan.com),我方将及时处理。
- 2、本文的引用仅供读者交流学习使用,不涉及商业目的。
- 3、本文内容仅代表作者观点,感算商城不对内容的准确性、可靠性或完整性提供明示或暗示的保证。读者阅读本文后做出的决定或行为,是基于自主意愿和独立判断做出的,请读者明确相关结果。
- 4、如需转载本方拥有版权的文章,请联系感算商城(service@gansuan.com)注明“转载原因”。未经允许私自转载感算商城将保留追究其法律责任的权利。




